The user can define motion, initial conditions, and friction force using Joint page.
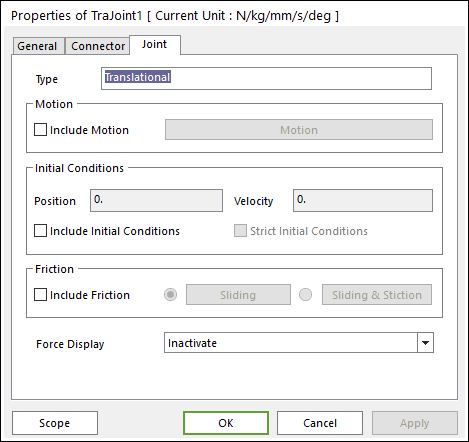
Figure 1 TraJoint property page [Joint page]
•Motion: Defines the motion of translational joint. For more information, click here.
•Initial conditions
•Include Initial Conditions: If checked, enables the user-specified initial conditions (position and velocity).
o Position: The initial signed distance from the joint’s base marker to the action marker, specified in Length units. The distance is positive if the vector V (see Fig. 2) points in the same direction as the z-axis of either marker. Note that the z axes of the markers will be parallel after position pre-analysis is completed.
o Velocity: The initial relative translational velocity between the two bodies, specified in units Length/Time. The positive direction is identical to the positive Position direction.
•Strict Initial Conditions: Indicates that the initial condition settings should be strictly enforced. See Common UI Joint for more details.

Figure 2 The direction of positive initial position for a translational joint

Figure 3a A translational joint with a Position Initial Condition of 0

Figure 3b The Initial Conditions for Fig. 3a

Figure 4a A translational joint with a Position Initial Condition of 200
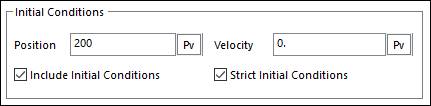
Figure 4b The Initial Conditions for Fig. 4a
•Include Friction: If this option is checked, the user can define the friction type of translational joint between Sliding and Sliding & Stiction.
•Force Display: Displays the resultant force vector graphically on Working Window. For more information, click here.