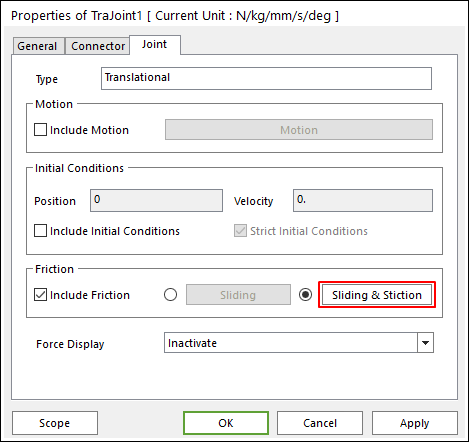
This defines the friction force which contains stiction algorithm on the translational joint. Include Friction option in Joint property page must be checked and Sliding and Stiction is selected to use the friction force.
Figure 1 TraJoint property page [Sliding & Stiction type]
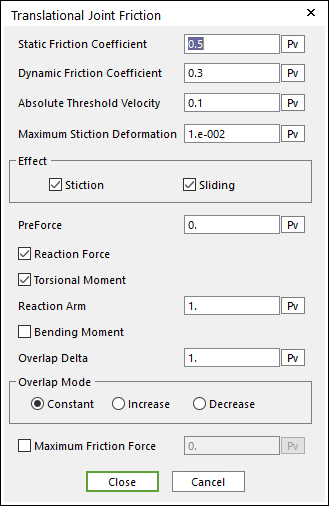
Figure 2 Translational Joint Friction dialog box
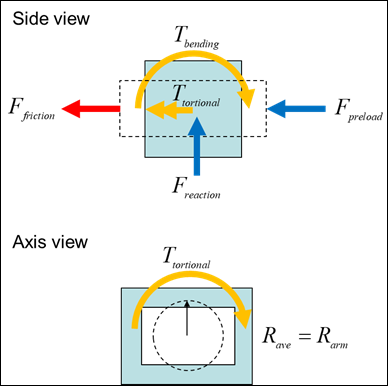
Figure 3 Configuration of Sliding and Stiction Friction Force on Translational Joint
The frictional torque is calculated according to the following equation:

where,
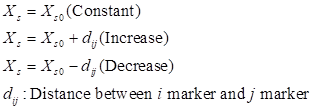
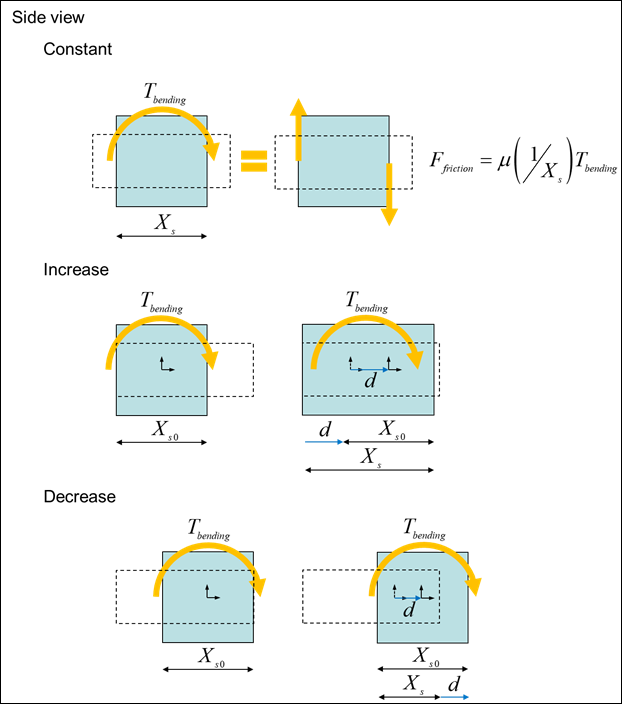
Figure 4 Detail of Overlap Mode and Delta
Where, the inputs into the equation are defined in the following table:
|
Current Friction Coefficient |
|
The coefficient of friction calculated during the simulation is a function of the relative velocity between body surfaces. |
|
Static Friction Coefficient |
|
The coefficient of friction is zero at a zero velocity,
but it smoothly transitions to the static coefficient of friction at
Absolute Threshold Velocity ( |
|
Effect |
|
Checks Stiction or Sliding
For more information, click here. |
|
PreForce |
|
A constant frictional force that acts during the entire simulation. |
|
Reaction Force |
|
The force in the joint calculated during the simulation in the direction normal to the translational axis. |
|
Torsional Moment |
|
The calculated torque in the joint about the rotational axis. |
|
Reaction Arm |
|
The average distance or radius from the translational axis. |
|
Bending Moment |
|
The calculated torque that acts at right angles to the translational axis. |
|
Overlap Delta |
|
A distance that starts at a nominal value and increases according to the translation of the action body with respect to the base body. |
|
Overlap Mode |
|
Selects Constant, Increase, or Decrease. |
|
Maximum Friction Force |
|
Collisions during contact as well as transitions during sliding forces can result in force spikes. High frictional forces can result from these spikes. This option allows a maximum friction force to be defined that should correspond to the maximum expected steady-state force. |











