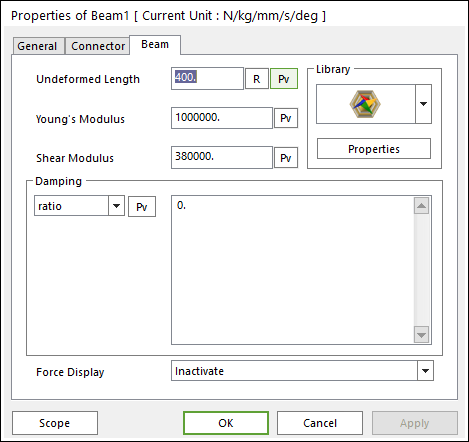
Figure 1 Beam property page
The forces and torques are defined by Timoshenko beam theory [7] and are applied to the action marker as follows:
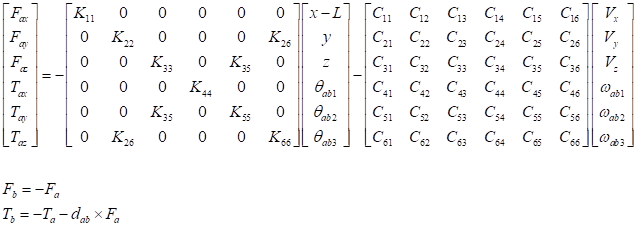
Where,  is the instantaneous vector from the
base marker to the action marker.
is the instantaneous vector from the
base marker to the action marker.
The inputs into the equation are defined in the following table:
|
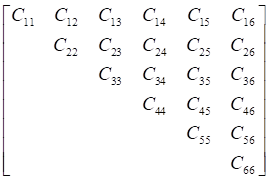
Matrix of Stiffness Coefficients |
|
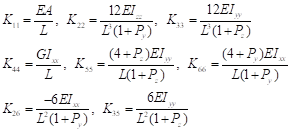
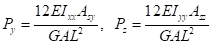
The coefficients that determine spring stiffness are calculated as below equations (units are force/length).
where,
|
|
Undeformed Length |
|
Enter the undeformed length of the beam along the x-axis. |
|
Young’s Modulus |
|
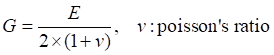
Specify the young's modulus of elasticity for the beam material (unit is force/length^2). |
|
Shear Modulus |
|
Specify the shear modulus of the beam (unit is force/length^2).
|
|
Moment of Area |
|
Enter the torsional constant This value is calculated automatically using Library |
|
|
Enter the area moments of inertia about the neutral axes of the beam cross sectional areas (y-y and z=z). These values are calculated automatically using Library | |
|
Shear Area Ratio |
|
Enter the shear area ratio for shear deflection in the y direction for Timoshenko beams. This value is calculated automatically using Library |
|
|
Enter the shear area ratio for shear deflection in the z direction for Timoshenko beams. This value is calculated automatically using Library | |
|
Area of Cross Section |
|
Enter the uniform area of the beam cross-section geometry. This value is calculated automatically using Library |
|
Damping Coefficient (matrix) |
|
Enter the coefficient that determines the damping force given the velocity of the beam end points (units are force-time/length). If the matrix for structural damping is selected, the upper triangular matrix for the damping should be entered since the damping matrix is symmetric.
|
|
Viscous Damping Coefficient (ratio) |
|
The damping coefficient matrix is calculated as
|
|
Displacements |
|
Translational and rotational displacements of the action marker with respect to the base marker |
|
Velocities |
|
Translational and rotational velocities of the action marker with respect to the base marker |
•Force Display: Displays the resultant force vector graphically on Working Window. For more information, click here.