KISSsoft Gear Train has specialized outputs. In particular, force and torque vector are defined with respect to gear reference frame which has y-axis from the center of gear1 to the center of gear2 and a z axis that is the same as the z axis of gear1. However, the y axis of the internal gear is in the direction from the center of gear2 to the center of gear1 as opposed to the external gear.
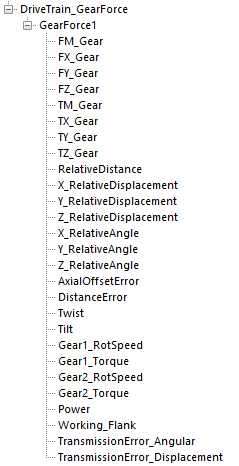
Figure 1 RPLT Data of KISSsoft Gear Train
•FM_Gear: Force magnitude applied to action gear.
•FX_Gear: X component of translational force acting at the action marker of GearForce which is center of gear2 with respect to gear reference frame.
•FY_Gear: Y component of translational force acting at the action marker of GearForce which is center of gear2 with respect to gear reference frame.
•FZ_Gear: Z component of translational force acting at the action marker of GearForce which is center of gear2 with respect to gear reference frame.
•TM_Gear: Torque magnitude applied to action gear.
•TX_Gear: X component of torque acting at the action marker of GearForce which is center of gear2 with respect to gear reference frame.
•TY_Gear: Y component of torque acting at the action marker of GearForce which is center of gear2 with respect to gear reference frame.
•TZ_Gear: Z component of torque acting at the action marker of GearForce which is center of gear2 with respect to gear reference frame.
•RelativeDistance: Magnitude of distance between the center of gear1 and the center of gear2.
•X_RelativeDisplacement: X component of translational displacement of the center of gear1 with respect to base marker.
•Y_RelativeDisplacement: Y component of translational displacement of the center of gear1 with respect to base marker.
•Z_RelativeDisplacement: Z component of translational displacement of the center of gear1 with respect to base marker.
•X_RelativeAngle: Roll of the action marker at center of gear1 with respect to base marker.
•Y_RelativeAngle: Pitch of the action marker at center of gear1 with respect to base marker.
•Z_RelativeAngle: Yaw of the action marker at center of gear1 with respect to base marker.
•AxialOffsetError: Definition of this value is the same as the axial offset used in meta model. Click here.
•DistanceError: Definition of this value is the same as the distance error used in meta model. Click here.
•Twist: Definition of this value is the same as the twist used in meta model. Click here.
•Tilt: Definition of this value is the same as the tilt used in meta model. Click here.
•Gear1_RotSpeed: Rotational speed of gear1.
•Gear1_Torque: Rotation: Rotational torque of gear1.
•Gear2_RotSpeed: Rotational speed of gear2.
•Gear2_Torque: Rotational torque of gear2.
•Power: Product of torque and rotational speed. This value is the same for both gear1 and gear2.
•Working_Flank: if right flank has contact, this value is 0. In other cases, this value is 1.
•TransmissionError_Angular: If the gear pair does not make an ideal rotation, it is the value expression how much it is. it is calculated by
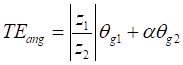
Where,  are the number of tooth for
gear1 and gear2 respectively.
are the number of tooth for
gear1 and gear2 respectively.  is the rotation angle
of gear1 and
is the rotation angle
of gear1 and  is the rotation angle of
gear2.
is the rotation angle of
gear2.  has ‘1’ in the case of
external gear and it has ‘-1’ in the case of internal gear.
has ‘1’ in the case of
external gear and it has ‘-1’ in the case of internal gear.
•TransmissionError_Displacement: If the gear pair does not make an ideal rotation, it is also the value expression how much it is. This value is widely used in gear analysis. it is calculated by

Where,  are the number of base radius
for gear1 and gear2 respectively. Other values are the same as them expressed in
TransmissionError_Angular.
are the number of base radius
for gear1 and gear2 respectively. Other values are the same as them expressed in
TransmissionError_Angular.