In the meta model, 6 variables are used in order to represent gear pair geometry.
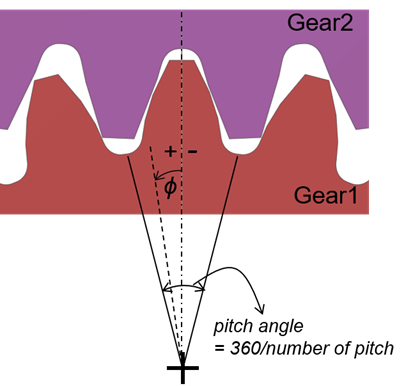
•Rotational Angle (ɸ)
It represents rotational angle of gear1(base body). It has the range from -pitch angle to +pitch angle.
Figure 1 Definition of Rotational Angle
•Penetration (δ)
It indicates the degree to which gear2 travels further based on the state of transmission error being zero. It is a unit of length and is defined by multiplying the angle of rotation by the pitch radius of gear2. It has a positive value when rotated by the + z axis (upward direction in the drawing).
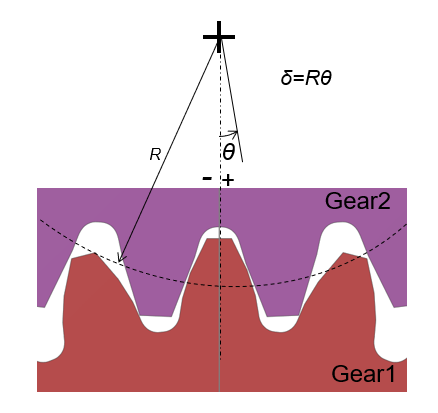
Figure 2 Definition of Penetration
It represents variation from initial center distance.
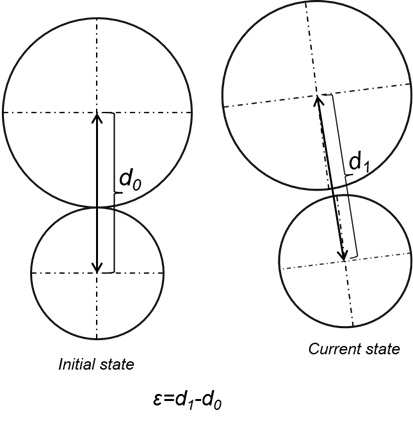
Figure 3 Definition of Distance Error
It represents the offset value of gear2 relative to gear1 in axial direction. The offset in the direction opposite to the z-axis of gear1 has a positive sign.
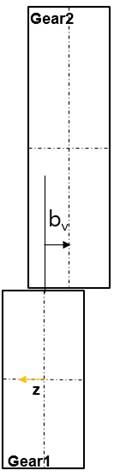
Figure 4 Definition of Axial Offset
Looking down for the gear pair, it shows how much gear2 rotates relative to gear1. The twist value generated by rotation of gear2 in the upward direction in the drawing has a negative sign and the opposite rotation has a positive sign.
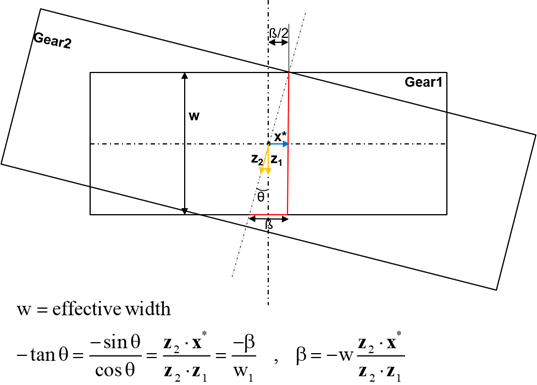
Figure 5 Definition of Twist
When you look at the gear pair from the right side, it shows how much gear2 rotates relative to gear1. The tilt value generated by rotation of gear2 in the upward direction in the drawing has a positive sign and the opposite rotation has a negative sign.
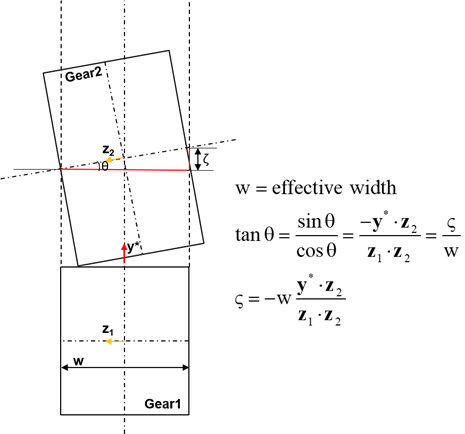
Figure 6 Definition of Tilt
Note
If the value of 6 variables calculated according to the gear pair geometry is out of the predefined range, it is processed as follows.
In the case of a rotation angle(ɸ), it is a cylic boundary, so it does not go out of range. In the case of penetration(δ), the value should be defined only within the specified range. Therefore, it is readjusted to have the end value of the boundary.
For the remaining four variables, the RecurDyn solver does not readjust the calculated value with bounded values, such as penetration(δ), for values that are out of range. However, since the gear force cannot be interpolated for out-of-bounds variables using table data, the linear extrapolation method is used to calculate gear forces for out-of-range variables.