The DC machine block implements a series-connected or a shunt-connected DC motors.
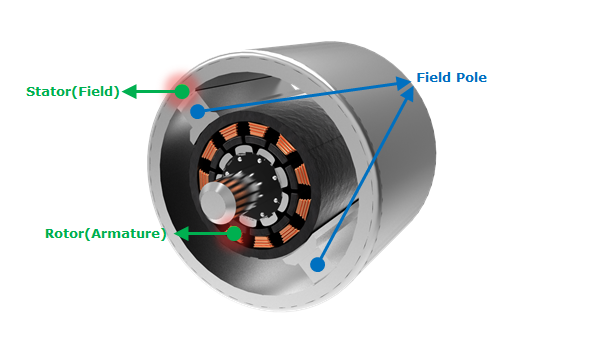
Figure 1 DC Motor
Dialog Box
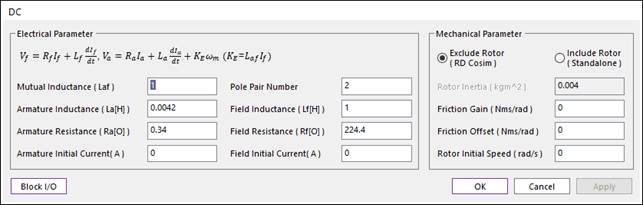
Figure 2 DC dialog box
Electrical Parameter
|
Parameter Name |
Signal |
Description |
|
Mutual Inductance
|
|
The magnetizing inductance. This is characteristic value of the motor. Please set to ‘1’ when you don`t know the value. [H] |
|
Pole Pair Number |
|
The number of pole pairs. It means how many pairs of ‘Field Pole’ in Figure1 there are. In Figure1, the value of Pairs of Poles is ‘1’. |
|
Armature Resistance |
|
The armature resistance between the armature terminal A+ and A-. You can find the value of Armature Resistance in the datasheet. [Ohms] |
|
Armature Inductance |
|
The armature inductance between the armature terminal A+ and A-. You can find the value of Armature Inductance in the datasheet. [H] |
|
Armature Initial Current |
|
Initial value of armature current. Set this value to ‘0’ if you don`t know it. |
|
Field Resistance
|
|
The field resistance between the field terminal F+ and F-. You can find the value of Filed Resistance in the datasheet. [Ohms] |
|
Field Inductance
|
|
The field inductance between the field terminal F+ and F-. You can find the value of Filed Inductance in the datasheet. [H] |
|
Field Initial Current |
|
Initial field current. Set this value to ‘0’ if you don`t know it. |
Mechanical Parameter
|
Parameter Name |
Signal |
Description |
|
Exclude Rotor / Include Rotor |
|
Select the type of Motor between ‘Exclude Rotor’ and ‘Include Rotor’. The more detail explanation of two types is in the Mechanical Part of the Equation of DC. |
|
Rotor Inertia
|
|
Inertia of rotor. This parameter don`t need on the Rotor Speed Type. You can find the inertia of rotor in the datasheet. [kg*m^2] |
|
Friction Gain
|
|
Viscous friction gain between motor and load. When you apply the friction between the motor and the load in your dynamic model, you have to set this value to ‘0’. [Nms] |
|
Friction Offset
|
|
Viscous friction Offset between motor and load (B |
|
Rotor Initial Speed
|
|
Initial value of rotor speed. Set this value to ‘0’ if you don`t know it. [rad/s] |









