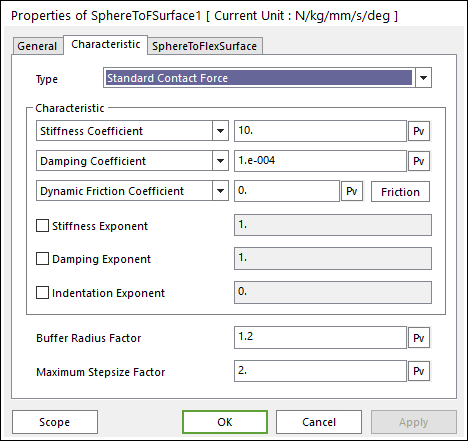
Figure 1 Characteristics tab of the Properties of SphereToFSurface dialog box [Standard Contact Force]
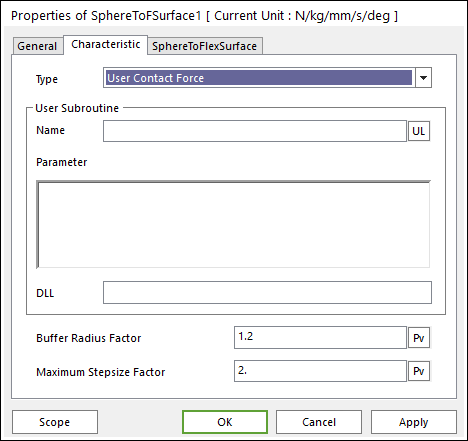
Figure 2 Characteristics tab of the Properties of SphereToFSurface dialog box [User Contact Force]
•Type: Allows you to select “Standard Contact Force” or “User Contact Force”. In the case of “User Contact Force”, the contact force is defined by the user’s written contact subroutine (Refer to Contact User Subroutine).
•Characteristic: Defines the contact properties such as the stiffness coefficient, damping coefficient, and friction coefficients. Also these coefficients are given as user-defined spline curves.
•Stiffness Coefficient: Specifies a stiffness coefficient for the contact normal force.
•Damping Coefficient: Specifies a viscous damping coefficient for the contact normal force.
•Exponent
o Stiffness and Damping Exponent: Generates a non-linear contact normal force.
o Indentation Exponent: Yields an indentation damping effect.
o When the penetration is very small, the contact force is negative due to a negative damping force, which is not realistic.
o This situation is overcome by using the indentation exponent greater than one.
o The contact normal force is calculated by

where,
k and c are the stiffness and damping coefficients which are determined by an experimental method, respectively.
m1, m2 and m3 are the stiffness, damping and indentation exponents.
 and
and  are a penetration and time
differentiation of the penetration, respectively.
are a penetration and time
differentiation of the penetration, respectively.
•Dynamic Friction Coefficient: Specifies a dynamic friction coefficient for the contact friction force. It gives three options.
o Dynamic Friction Coefficient: The constant friction coefficient is applied.
o Friction Force Spline: Shows the relative velocity to the friction force.
o Friction Coefficient Spline: Shows the relative velocity to the friction coefficient.
•User Subroutine
•Name: Is the name of user specified subroutine.
•Parameter: Shows the parameters used in the user specified subroutine.
•DLL: Shows the name of which DLL contains the contact user subroutine.
•Buffer Radius Factor: The numerical integrator reduces the step size by the maximum step size factor if the action body come closer than Buffer radius factor* Action body radius.
•Maximum Step Size Factor: The maximum step size is reduced by a factor of maximum step size factor.