In practice, the single pin track link system of a low mobility tracked vehicle is modeled as a series of bodies connected by bushings around the link pins which are inserted into a shoe body with a radial pressure to reduce rattling of the pin. The bushings tend to reduce the high impulsive contact forces by providing cushion and reducing the relative angle between the track links. In this bushing force, a continuous force model is used to represent the pin connections. This force model is a non-linear function of the coordinates of the two links.
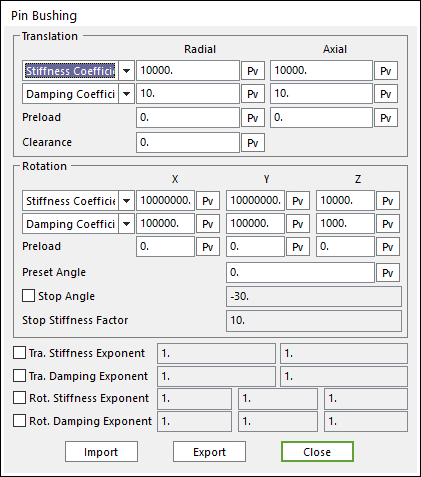
Figure 1 Pin Bushing dialog box
The Pin Bushing is a radial type bushing. For more information, click here.
•Clearance
When rubber bushings wear out, the connections get clearance in the radial direction. In such a case, there are no longer like perfect bushings. The user is able to model the bushings with gap by using the clearance.
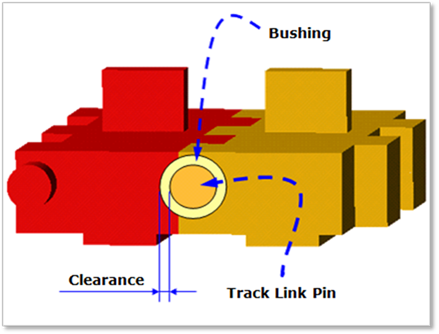
Figure 2 Clearance
•Preset Angle
Bushings are intentionally bended initially to prevent a too large rotational deformation of the bushings when they pass around the sprocket or idler. For example, if the rotation of one link relative to its adjacent link is 14 degrees while passing around the sprocket, the pin bushing will rotate only 7 degrees if the initial preset angle is 7 degrees instead of 14. As a result, the pin bushing will experience only torque equivalent to the 7 degrees of deformation. This will increase the life cycle of the rubber bushing pin.
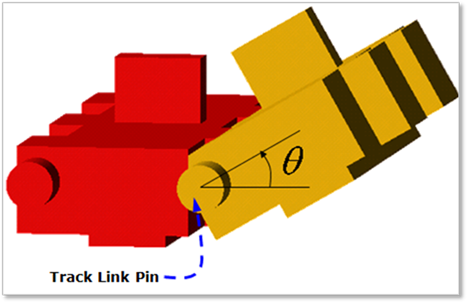
Figure 3 Preset Angle
•Stop Angle
Two adjacent grousers often come in contact. So, the relative rotation of two grousers is limited. This rotational limitation can be modeled by a stop angle. The stop angle can be defined by checking in Stop angle and Stop stiffness factor in the pin bushing dialog box. Therefore, Bending back about z-axis direction is prevented by Stop angle. Stop angle is modeled by multiplying stiffness coefficient by Stop stiffness factor when the rotational angle of Z-axis passes over the stop angle
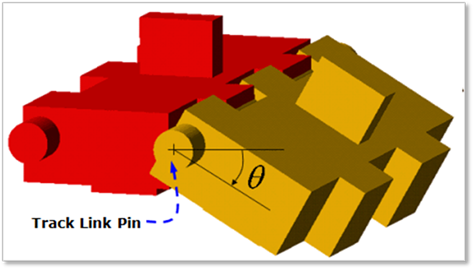
Figure 4 Stop angle