考虑行驶工况的电动汽车减速器建模 taehyun96 完成日期
[电动汽车动力传输]
电动汽车的动力来自电动机。电动机提供动力给减速机,通过减速器转换成适当的转矩和转速,最终传递给车轮。反过来,来自车轮的阻力也会传到电机上,如图1所示。
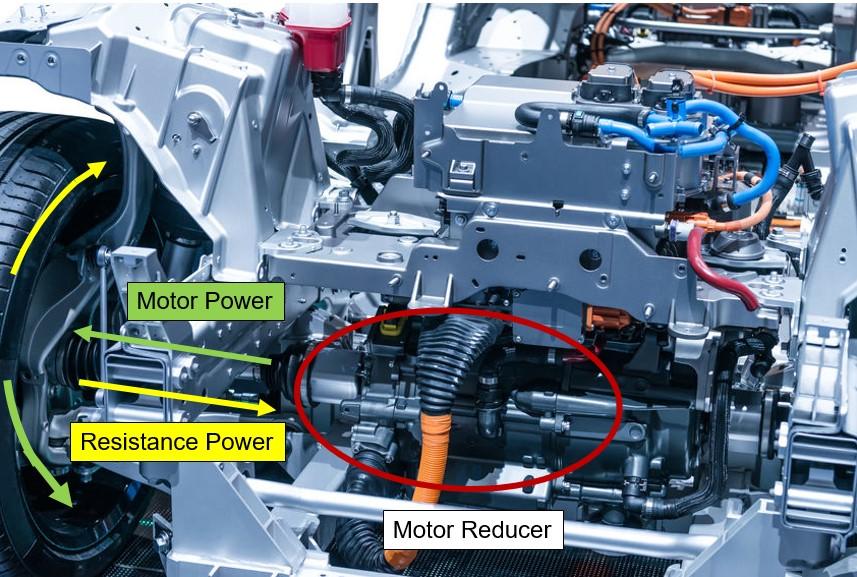
图1 减速器结构
行驶阻力是指车辆行驶时所产生的阻力。如果由于车内装载的物体增加而导致负载增大,或者在不平的地面上行驶,以及在陡峭的坡道上行驶时,行驶阻力会增加。相反,如果车辆负载较小,在铺好的道路上行驶,或下坡行驶时,则行驶阻力会减小。即使车辆以相同的速度行驶,如果行驶阻力较大,则需要电机提供更大的输出。如果行驶阻力很小,则可以用相对较小的输出达到所需的速度。
[减速器动力学模型]
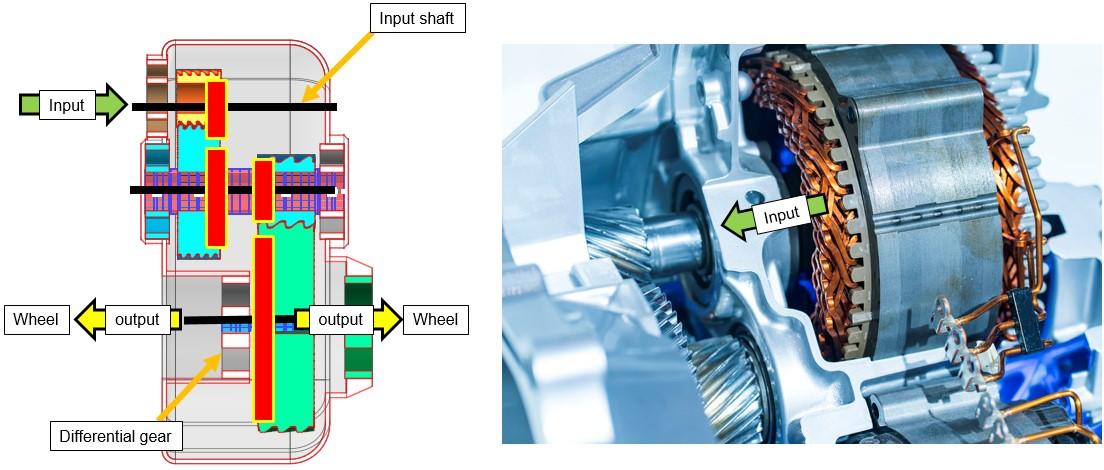
图 2 减速器模型
创建减速器动力学模型的约束条件很简单,如图2所示。给轴添加旋转副,并定义齿轮之间的接触关系。减速器边界条件(电机的输入/输出)可以简单地输入速度或转矩。例如,减速器的输入是从电动机传递的功率,一般定义为转速或转矩。减速器的输出可以定义为车轮的转速或阻力矩。因此,为了通过仿真得到理想的结果,有必要定义适当的边界条件。问题是如何得到速度或转矩作为边界条件。如果通过测量得到具体值就比较直截了当,但是如果没有,也可以计算得到,并使用输入和输出值作为减速器的边界条件。
[边界条件计算]
下面我们来通过一个简单的例子学习边界条件的计算方法。
<条件>
- 车重:1530Kg
- 电机最大功率:100Kw
- 电机最大转矩:295Nm
- 传动比(电机与车轮):7.68
- 车轮外径:627mm
<问题>
当车辆在坡度为30%的沥青路面上以50kph的恒定速度行驶时,减速器的输入输出边界条件是什么?
<解答>
a. 输入边界条件 (电机转速)
以电机转速作为减速器的输入条件时,可以根据轮速和传动比计算电机转速。如果车速为50kph,车轮外径为627mm,车轮转速可计算为:

通过车轮转速和传动比计算出电机转速:

b. 输入边界条件 (行驶阻力扭矩)
将阻力矩作为减速器的输出条件时,计算方法如下:
要计算行驶阻力矩,首先需要知道行驶阻力是多少。您可以使用行驶阻力和车速计算“行驶阻力功率”,并使用行驶阻力功率和车轮转速计算施加到车轮上的阻力矩。
(行驶阻力)
有四个主要的行驶阻力。轮胎与地面接触产生的滚动阻力、坡度引起的坡度阻力、车辆加速度产生的加速度阻力、空气引起的空气阻力。在这个问题中,假设没有空气阻力,并且由于它是恒速行驶,因此不考虑加速度引起的阻力。
1. 滚动阻力
滚动阻力(Rr)的定义为车重(W)和滚动阻力系数(μ)的乘积:

关于滚动阻力系数,根据路面条件不同,其定义如表1所示。
表 1 不同路面条件的滚动阻力系数取值

考虑上述条件,滚动阻力(Rr)计算如下:

2. 坡度阻力
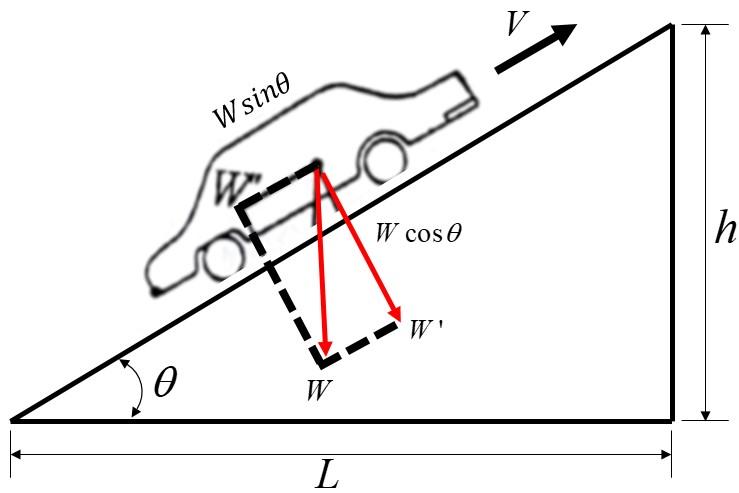
<그림 3>
如图3所示,如果θ不是很大,可以认为sin〖θ≅tanθ 〗,道路的坡度tanθ表示高度h(m)与水平距离L(m)之比(百分比%)。此题中,水平距离基于L=100(m)。因此,坡度阻力(Rs)可表示为:

因此,当坡度为30%时,坡度阻力计算如下:

3. 总行驶阻力
总行驶阻力(R)等于上面提到的四种阻力之和。由于本题中不考虑空气阻力和加速度阻力,因此总行驶阻力等于滚动阻力和坡度阻力之和(式9)。

(行驶阻力功率)
行驶阻力功率NR(hp) 可以通过汽车的恒定速度V (km/h),行驶阻力R (kg)和机械效率(η_t)进计算得到(式10)。

假设机械效率为η_t=1,运用计算出的总行驶阻力(式9),那么行驶阻力功率应为(公式11)。

将单位转换为瓦特(W),1hp = 0.75kW,计算如下:

(行驶阻力矩)
功率与转矩的关系(式13)如下式:

得到转矩为(式14):

通过车辆的行驶速度和车轮尺寸计算车轮的转速为(公式15):

因此,将式(12)、(15)代入式(14)中,计算阻力矩如下(式16):

[基于RecurDyn的减速器建模]
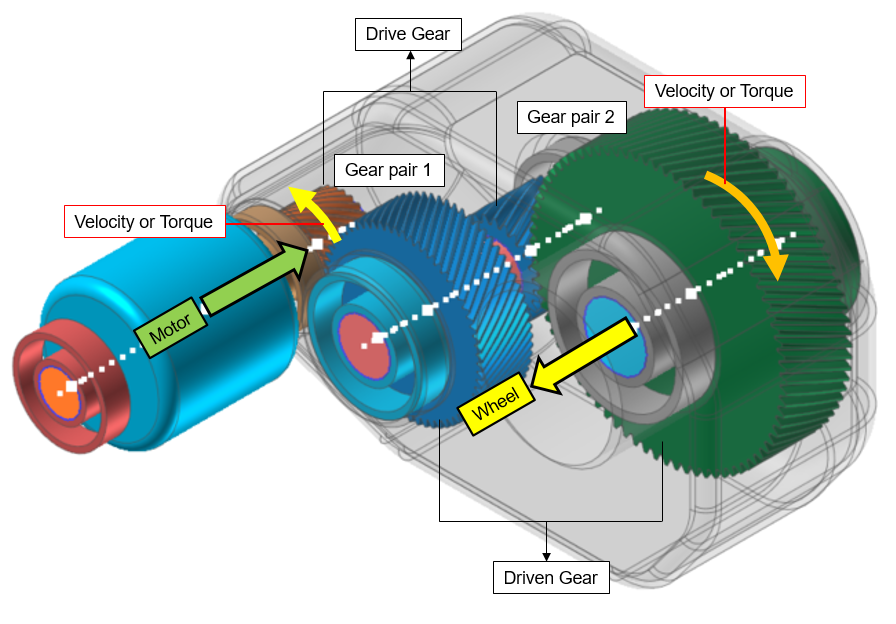
图4 RecurDyn中的减速器模型
图4中的模型是运用RecurDyn传动系工具包DriveTrain建立的。该模型主要包括齿轮,轴承和轴等传动工具包提供建立这些传动部件的接口。建立的轴是由梁单元组成的柔性体,因此可以分析其轴向形变。关于轴承建模,可以从轴承库中选择也可以通过输入尺寸信息来创建自定义轴承。该模块可以通过输入基本尺寸信息快速生成齿轮模型,并且其特的齿轮接触可以实现快速、准确的计算。
在创建的模型中设置之前计算的边界条件,如表2所示。
表 2 计算结果

也就是说,电动机的转速,即式(2)中计算的结果,3249.02 RPM作为减速器的输入,式(16)的计算结果1486.72 Nm作为减速器输出的阻力转矩。
由于驱动条件要求的电机输出与行驶阻力功率相等,假设没有输出损耗,则输入和输出的功率相同。因此,作用在电动机上的转矩也可以用式(14)计算。但是,当设置输入和输出为边界条件时,可以选择输入转速或转矩。当输入为速度时,转矩结果由运动的反作用力获得。当输入为转矩时,转速可作为结果进行查看。
[仿真结果]
在本例中,电机输入设置为速度,输出设置为阻力矩。分析结果表明,作用在电机上的转矩可以在(Gear pair1, 驱动齿轮转矩)中进行查看,其结果与前面的计算的结果近似(表2)。此外,可以在(Gear pair2, 驱动齿轮转速)中查看输出转速,同样,也可以验证之前的计算结果(表2)。
此外,该仿真模型还可以通过使用传动系工具包DriveTrain的元模型功能进行接触计算,并检验微米级的传动误差精确。元模型先计算齿轮的刚度,然后用它计算齿轮的接触,这样可以快速得到准确的结果。此外,即使需要在同一系统上进行迭代分析(如改变边界条件),也可以重用预先计算的元模型以获得快速结果。
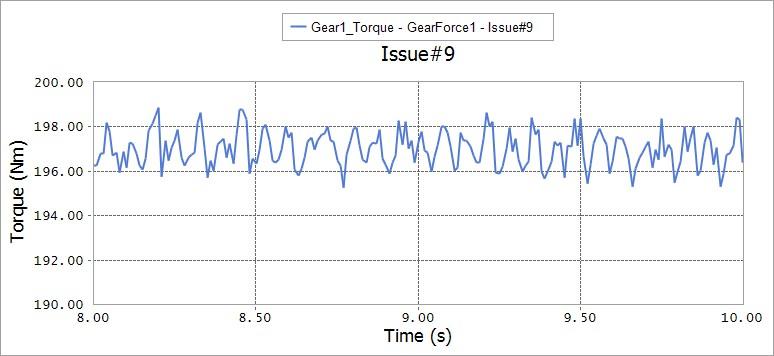
Gear pair 1, 驱动齿轮转矩
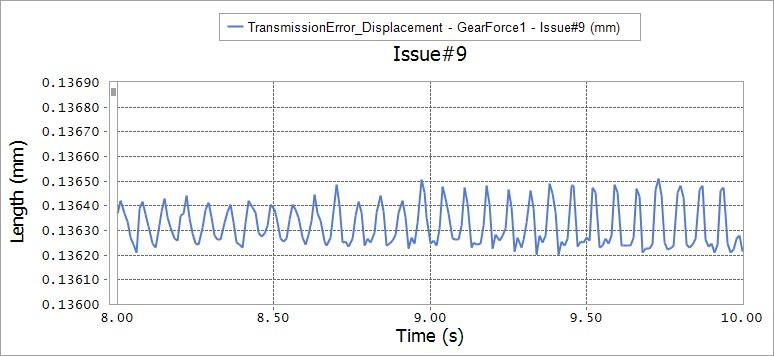
Gear pair 1, 驱动齿轮传动误差
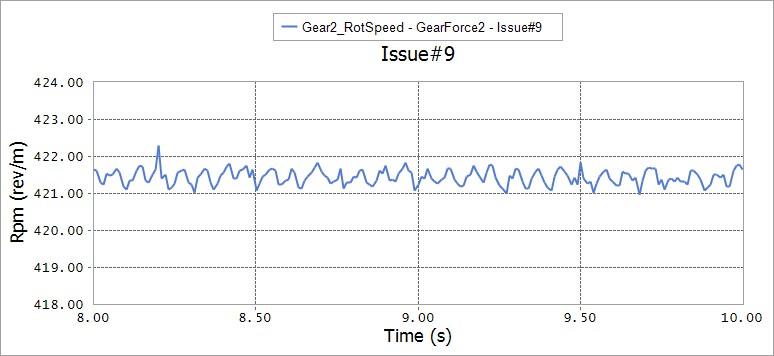
Gear pair 2, 从动齿轮转速
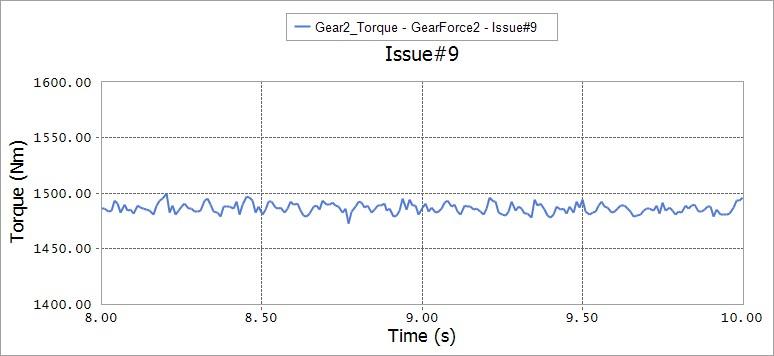
Gear pair 2, 从动齿轮转矩
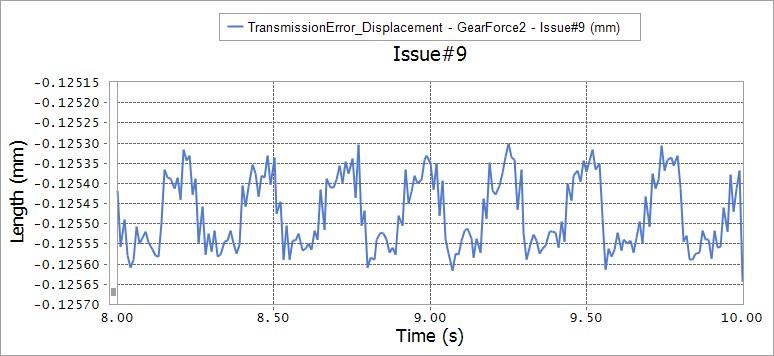
Gear pair 2, 从动齿轮传动误差
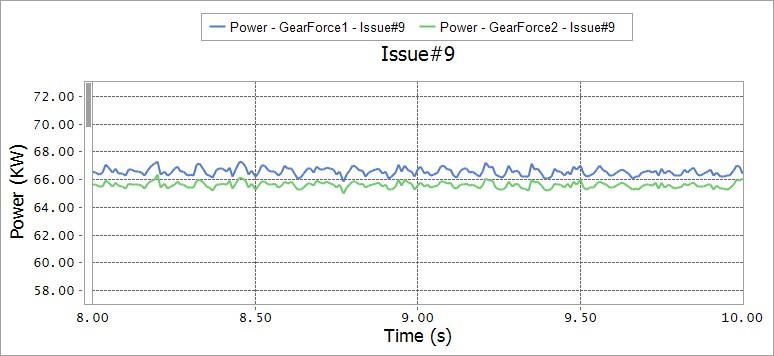
输出功率(蓝色), 输出功率(绿色)




