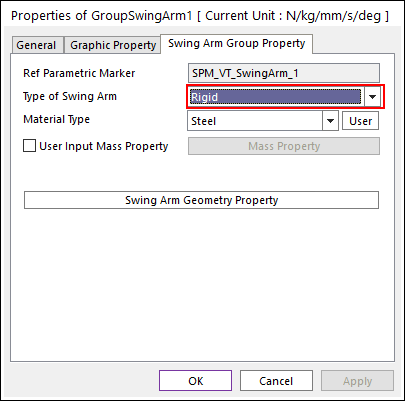
Rigid Type
All multi bodies are connected by fixed joint. It acts like one body.
Figure 1 Swing Arm property page [Rigid Type]
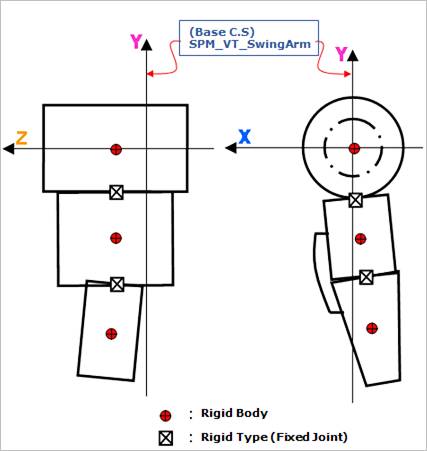
Figure 2 Rigid Type of the Swing Arm
Torsional & Bending Type
Multi bodies are connected by Bushing Force. It acts like flexible body.
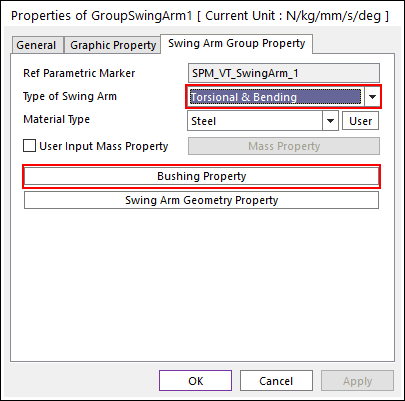
Figure 3 Swing Arm property page [Torsional & Bending Type]
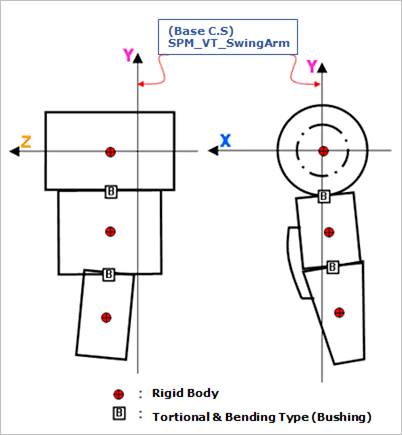
Figure 4 Torsional & Bending Type of the SwingArm
The user can modify the property of bushing force that connects multi bodies. For more information, refer to Bushing Force.
If the user clicks Bushing Property, the user can see the following dialog box.
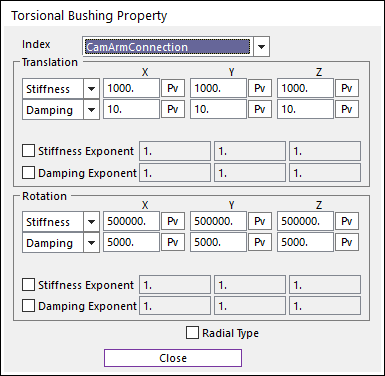
Figure 5 Torsional Bushing Property dialog box
Beam Type
Multi bodies are connected by Beam Force. It acts like flexible body.
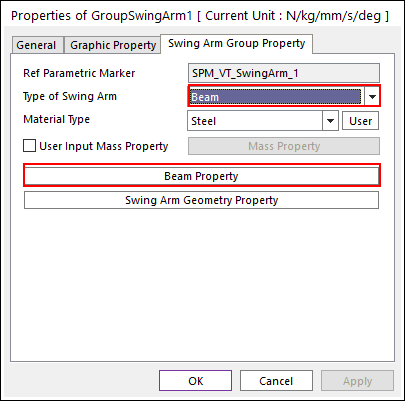
Figure 6 Swing Arm property page [Beam Type]
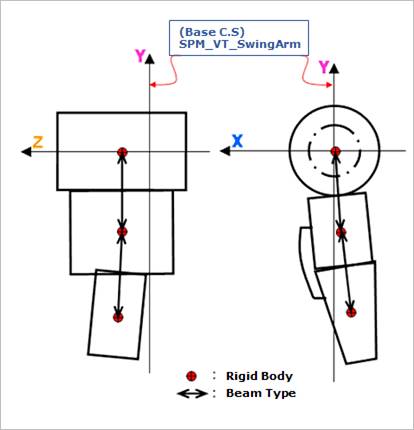
Figure 7 Beam Type of the Swing Arm
The user can modify the property of Beam Force that connects multi bodies. The user has to specify the value of Shear Modulus that is used to calculate Beam Force. For more information, refer to Beam Force.
If the user clicks Beam Property, the user can see the following dialog box.
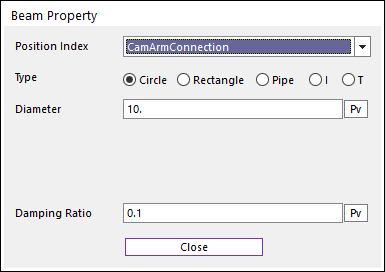
Figure 8 Beam Property dialog box