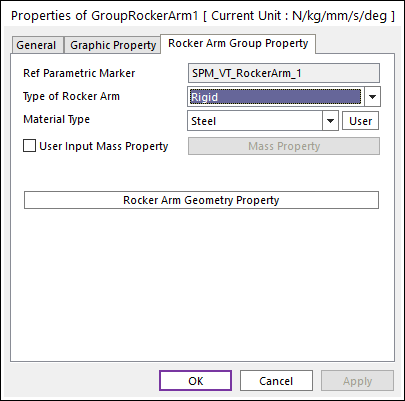
Rigid Type
All multi bodies are connected by fixed joint. It acts like one body.
Figure 1 Rocker Arm property page [Rigid Type]
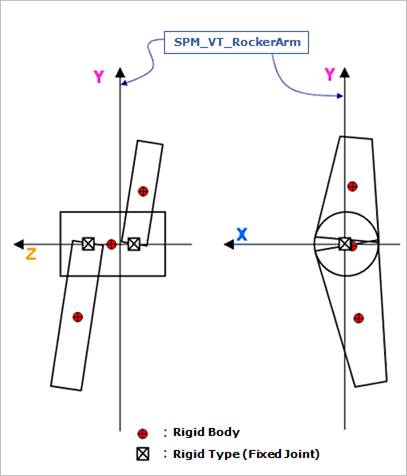
Figure 2 Rigid Type of the Rocker Arm
Torsional & Bending Type
Multi bodies are connected by Bushing Force. It acts like flexible body.
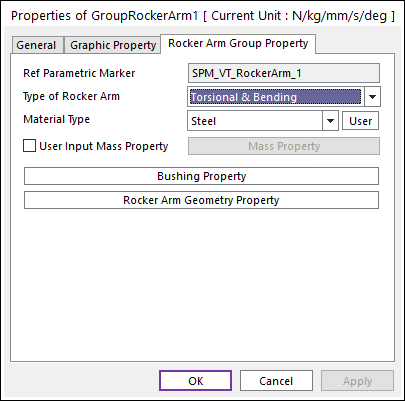
Figure 3 Rocker Arm property page [Torsional & Bending Type]
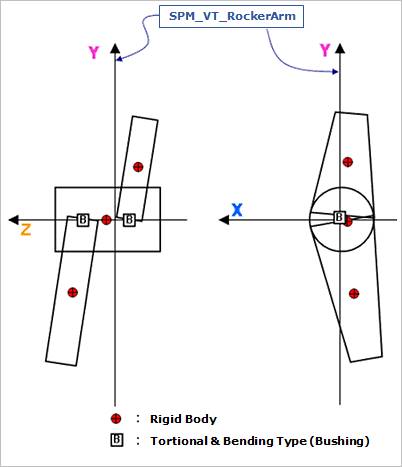
Figure 4 Torsional & Bending Type of the Rocker Arm
•Bushing Property: If Torsional & Bending type of Rocker Arm is selected, this function is activated and defines bushing property data. For more information, refer to Bushing Force.
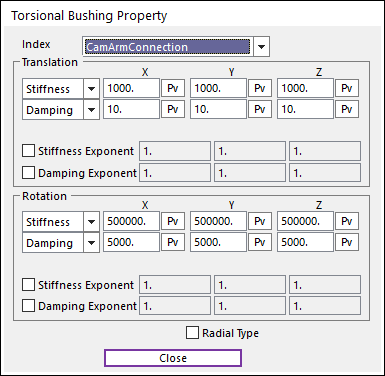
Figure 5 Torsional Bushing Property dialog box
Beam Type
Multi bodies are connected by Beam Force. It acts like flexible body.
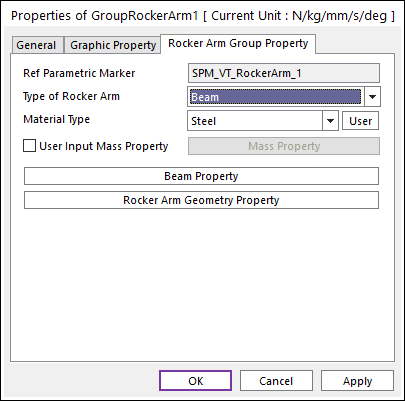
Figure 6 Rocker Arm property page [Beam Type]
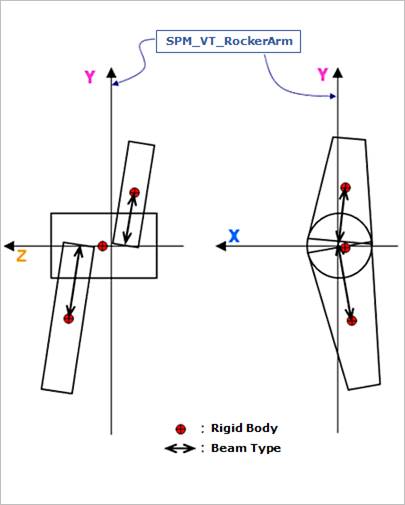
Figure 7 Beam Type of the Rocker Arm
•Beam Property: If Beam type of Rocker Arm is selected, this function is activated and defines beam force property data. For more information, refer to Beam Force.
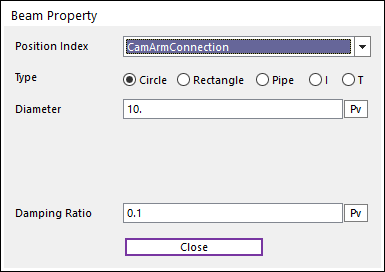
Figure 8 Beam Property dialog box