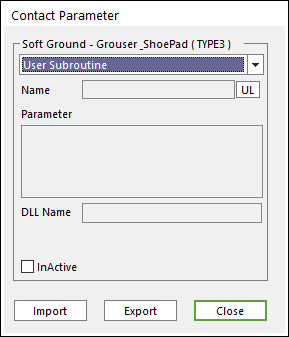
The contact parameter between soil ground and shoe pad can be defined by User Subroutine.
Figure 1 TYPE3 in Contact Parameter dialog box
This subroutine generates a user defined soil force.
|
Language type |
track_soil_force subroutine |
|
Fortran |
track_soil_force (time, info, upar, npar, dird, dirv, disp, lgori, ngpos, ngori, ngvel, length, width, iflag, result) |
|
C/C++ |
track_soil_force (double time, int info[], double upar[], int npar, double dird[],double dirv[], double disp[], lgori[], double ngpos[], double ngori[],double ngvel[], double length, double width, int iflag, double result[3]) |
Parameter information is as follows.
•time: Current simulation time of RD/Solver
•info: ID of body & node
•upar: Argument list array
•npar: Number of arguments in the argument list array
•dird: Direction vector of a ground patch
•dirv: Velocity of a contact node relative to direction vector
•disp: Sinkage & shear displacements
•lgori: Global orientation of a track link.
•ngpos: Global position of a contact node
•ngori: Global orientation of a contact node
•ngvel: Global velocity of a contact node
•length: Length of meshed rectangle at a track link
•width: Width of meshed rectangle at a track link
•iflag: When RD/Solver makes an initial call, the flag is true (-1)
•result: Returned force vector and three-dimensional array
Example
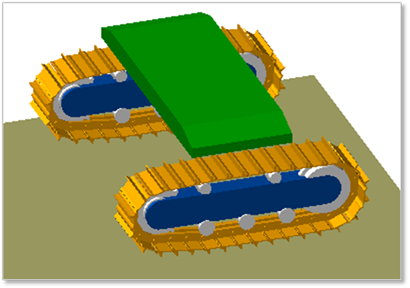
Figure 2 Track vehicle model using track soil user subroutine
To see code about example, click here.