
The STRAIN function returns the strain acting on a designated node on a flexible body.
Format
Using reference marker
Using 3 reference nodes

Arguments definition
|
Node ID |
Node number, including the names of the FFlex or RFlex Body, or argument number for the nodes to calculated for the strain value | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Type |
Symbol that indicates the type of strain to measure
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Setting Reference Frame |
RMarker |
The name or argument number of the standard marker for direction to be measured | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
3 reference nodes |
The name or argument number of the 3 reference nodes which define reference frame to be measured | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Position |
Recovery Postion for FFlex output node
If the recovery position is not specified, the default value is the TOP for shell and MD for beam. If the RFlex body has only one stress shape, this argument is ignored. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Reference Frame defined by 3 reference nodes
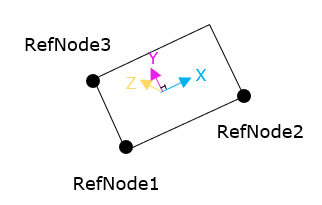
Figure 1 Definition of 3 nodal points reference frame
The reference frame defined by 3 nodal points is like above figure. X direction is parallel to the vector from reference node1 to reference node2 and Z direction is normal to the face which consist of 3 nodal points.
Example
STRAIN(Body1_FE.node1,X,Ground.InertiaMarker)
STRAIN(1,VON,2) < Argument: (1) Body1_FE.node1 (2) Ground.InertiaMarker >
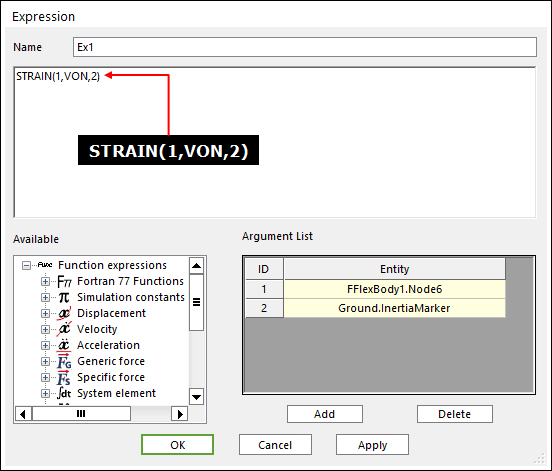
Figure 2 Example Expression using Strain function using RM
STRAIN(1,VON,2,3,4) < Argument: (1) Body1_FE.node50588 (2) Body1_FE.node50578 (3) Body1_FE.node50579 (4) Body1_FE.node50562 >
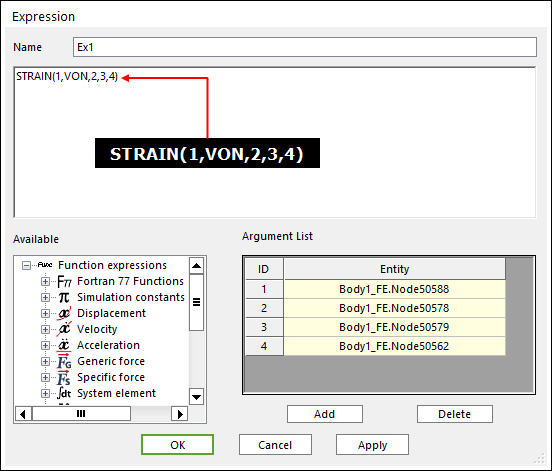
Figure 3 Example Expression using Strain function using 3 reference nodes
Note
The strain expression must not be used to apply the dependent force. Only the expression is used in the post procedure.
In order to see the strain result for non-output nodes in Scope Expression, all component such as EX, EY etc should be included in output files.