A spring can represent a physical spring and/or a physical damper (such as a shock absorber) that acts between two points on two different bodies.
A spring force can be defined with spring data (spring and damping coefficients, etc.) or with spline data. Spring values may be provided by the spring vendor or they can be determined by the physical tests. The stiffness coefficient can be directly measured (force/displacement). Damping can be determined by hanging a mass from the spring, stretching the spring, and counting the cycles until the system comes to rest. Then, the damping coefficient can be adjusted in a RecurDyn model until the dynamic behaviors matches.
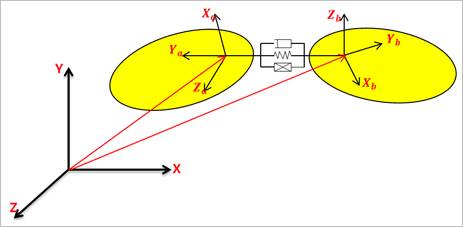
Figure 1 TSDA system
Figure 2 Spring icon of the Force group in the Professional tab