A pair of silent chain link consists of an outer link and inner link. A user must create a pair of chain link from which all chain links are copied. Once a pair of chain links is created, it will be registered as clone body. The inertial properties of the assembled chain link are automatically duplicated as the values of clone body. A single pin is used to connect two links of a chain system in this model. The geometric information provided by a user is used for both display and contact force computation in the solver. Therefore, the chain link properties must be defined carefully prior to assembling a chain system.
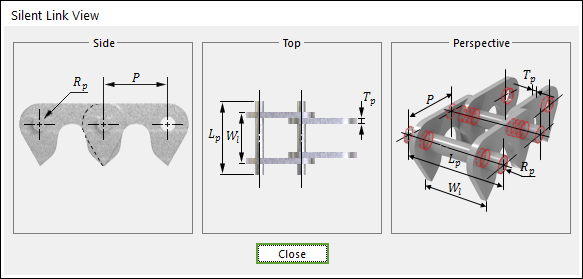
(a) Silent Chain link geometry
|
P |
Pitch |
|
Wl |
Total Width of Outer Link |
|
Tp |
Plate Thickness |
|
Rp |
Pin Radius |
|
Lp |
Pin Length |
(b) Dimension information
Figure 1 Silent Chain Link