The user can define motion and initial conditions using Joint page.
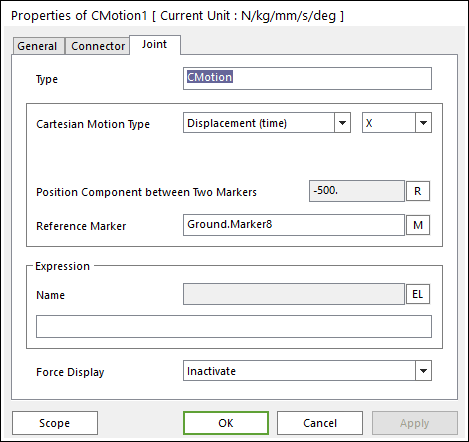
Figure 1 CMOTION property page [Joint page]
•Type: Shows the type of joint.
•Cartesian Motion Type: Specifies the degree of freedom to be constrained as X, Y, Z and RX, RY, RZ. And the user selects a type of following types.
•Displacement(time): Defines as the displacement type
•Velocity Time(time): Defines as the velocity type
o Initial Position: Defines the initial position.
•Acceleration(time): Defines as the acceleration type
o Initial Position: Defines the initial position.
o Initial Velocity: Defines the initial velocity.
•Position Component between Two Markers: Shows the displacement of two markers. Reloads when click R.
•Reference Marker: Defines the reference frame of the Cartesian coordinates. The default value is the inertia marker of ground.
•Expression: Defines the expression of the Cartesian motion.
•Name: Shows the name of applied expression.
•If the CMotion joint is connected to an FFlex body that is included in the pre-analysis and the CMotion joint specifies a rotation, then the rotation’s initial value should be greater than -90 degrees and less than 90 degrees.
•Force Display: Displays the resultant force vector graphically on Working Window. For more information, click here.
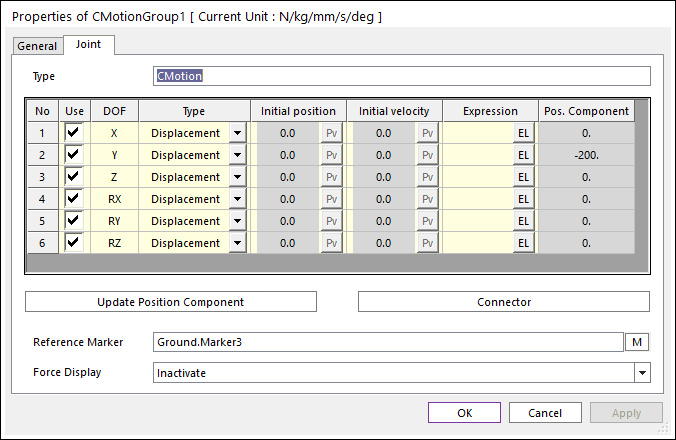
Figure 1 CMOTION property page [Joint page]
•Update Position Component: Reloads the displacement of two markers in Pos. Component columns.
•Connector: Shows the base and the action property page of joints. This page is different with its other joints. The name of base and action markers cannot be changed.
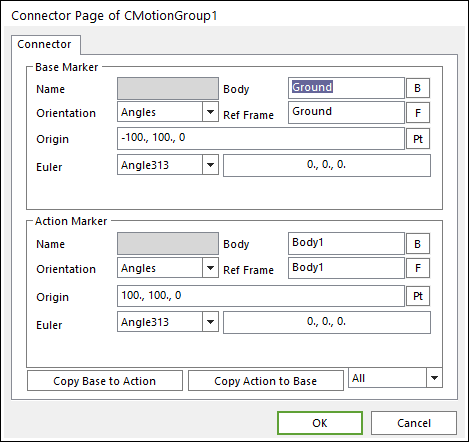
Figure 2 Connector page of CMotion Joint Group