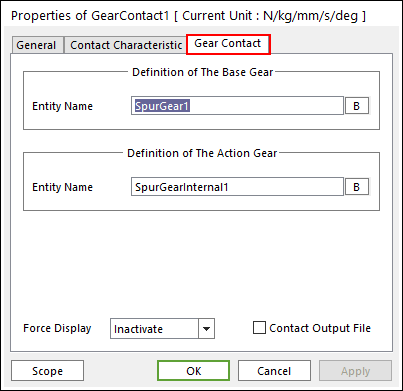
Figure 1 Gear Contact property page [Gear Contact page]
•Definition of The Base Gear
•Entity Name: Specifies the name of the base gear.
•Definition of The Action Gear
•Entity Name: Specifies the name of the action gear.
•Force Display: Graphically displays the resultant force vector on the view window. For more information, click here.
•Contact Output File: When this function is checked, RecurDyn creates the contact output file for contact information between gears as follows. The name of output file will be 'ModelName_ContactName.out'.
|
Col. |
Variables |
Descriptions |
|
1 |
Time (sec) |
Simulation Time |
|
2 |
amount of contact point |
Total number of calculated contact points |
|
3 |
Pos_TX of gear_1 CM |
Position X of base gear’s center marker |
|
4 |
Pos_TY of gear_1 CM |
Position Y of base gear’s center marker |
|
5 |
Pos_TZ of gear_1 CM |
Position Z of base gear’s center marker |
|
6 |
Pos_PSI of gear_1 CM |
Orientation Psi of base gear’s center marker |
|
7 |
Pos_THETA of gear_1 CM |
Orientation Theta of base gear’s center marker |
|
8 |
Pos_PHI of gear_1 CM |
Orientation Phi of base gear’s center marker |
|
9 |
Pos_TX of gear_2 CM |
Position X of action gear’s center marker |
|
10 |
Pos_TY of gear_2 CM |
Position Y of action gear’s center marker |
|
11 |
Pos_TZ of gear_2 CM |
Position Z of action gear’s center marker |
|
12 |
Pos_PSI of gear_2 CM |
Orientation Psi of action gear’s center marker |
|
13 |
Pos_THETA of gear_2 CM |
Orientation Theta of action gear’s center marker |
|
14 |
Pos_PHI of gear_2 CM |
Orientation Phi of action gear’s center marker |
|
15 |
|
The index for contact points |
|
16 |
Global contact position |
Global contact position |
|
17 |
Contact position based on gear_1 |
Contact position based on gear_1 |
|
18 |
Contact position base on gear_2 |
Contact position base on gear_2 |
|
19 |
Contact force based on gear_2 |
Contact force based on gear_2 |
|
20 |
Friction force based on gear_2 |
Friction force based on gear_2 |