The user can easily check for the proper displacement, velocity or acceleration between any two markers. It is a convenient method to calculate the relationship between two markers without using the request function.
Figure 1 Point to Point Scope icon of the Scope group in the Analysis tab
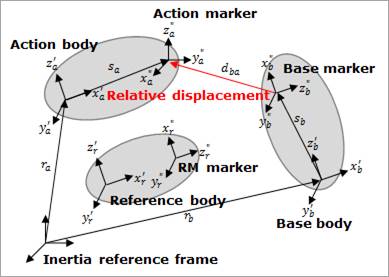
Figure 2 Point to Point of Scope
Translational Displacement
The translational displacement between two markers is defined by following equation.
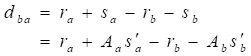
If the RM marker is defined, the relative displacement is computed as follows.

The distance between two markers is the magnitude of the relative displacement vector.

Rotational Displacement
The rotational displacement between two markers is the 1-2-3 Euler Angle of the action marker as measured from the base marker.

Translational Velocity
The translational velocity between two markers is defined by the following equation.


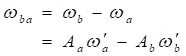
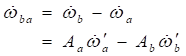
Rotational Velocity
The rotational velocity between two markers is defined by the following equation.
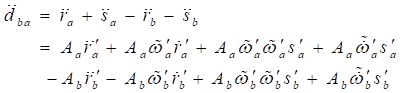
Translational Acceleration
The translational acceleration between two markers is defined by the following equation.

Rotational Acceleration
The rotational acceleration between two markers is defined by following equation.
Step to create a Point-To-Point Scope
1. Click Point-to-Point Scope in the sub menu of Scope menu.
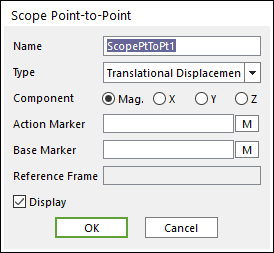
Figure 3 Point to Point Scope dialog box
2. Specify Name.
3. Select a Type among Translational Displacement, Translational Velocity, Translational Acceleration, Rotational Displacement, Rotational Velocity, and Rotational Acceleration.
4. Select a Component type as Magnitude, X, Y or Z.
5. Define Action Marker, Base Marker and Reference Frame.
6. Check the Display option.
7. Click OK.