The PID Controller block implement a continuous controller.
Dialog box
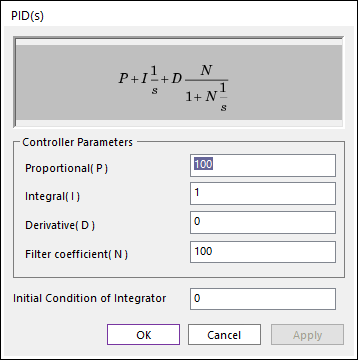
Figure 1 PID(s) dialog box
Parameters
|
Parameter(s) |
Description |
|
Proportional(P) |
Enter the proportional gain P. |
|
Integral(I) |
Enter the integral gain I. |
|
Derivative(D) |
Enter the derivate gain D. |
|
Filter coefficient(N) |
Enter the filler coefficient N, which determines the pole location of the filter in the derivate action. |
|
Sample time |
Enter the time interval between samples. |