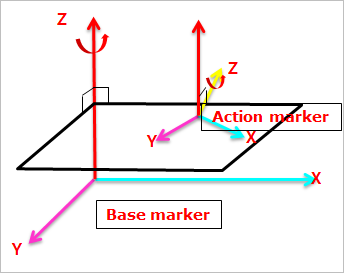
A perpendicular joint constrains the z-axis of action marker to be perpendicular to the z-axis of base marker as shown in Figure 1. The marker of the action body can be rotated about two axes with respect to the base body.
The resulting degrees of freedom are five. The rotation degrees of freedom is two and the translational degrees of freedom is three.
Figure 1 Definition of Perpendicular Joint
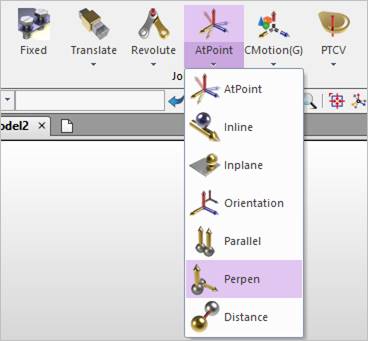
Figure 2 Perpen icon of the Joint group in the Professional tab