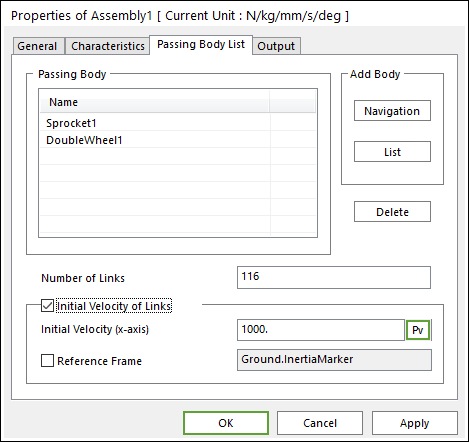
Figure 1 Assembly Information property page [Passing Body List page]
•Passing Body: Defines geometries to contact links.
•Navigation: Geometries can be selected by clicking the mouse on Working Window.
•List: Geometries can be selected in Track Body List dialog box. All entities in the model are shown in this dialog box.
Figure 2 Track Body List dialog box
•Delete: Geometries listed in Passing Body can be deleted.
•Initial Velocity of Links
•Initial Velocity (x-axis): Defines the initial velocity for the x-translational direction of the center marker of each link. If using Reference Frame option, PV could not be applied.
•Reference Frame: If this option is checked, the initial velocity is set as different values for x-translational and y-translational directions with respect to Reference Frame.