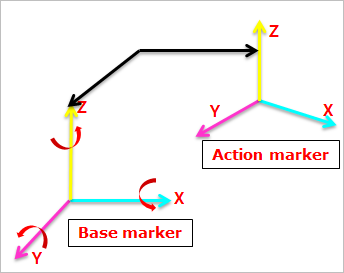
A parallel joint constraints the z-axis of the marker of action body so that it remains parallel to the z-axis of the marker of base body as shown in Figure 1. The action body is constrained relative to the base body. The marker of the action body can only rotate about one axis with respect to the coordinate system of the base body. This parallel joint has one rotational degree of freedom and three translational degrees of freedom.
Figure 1 Definition of Parallel Joint
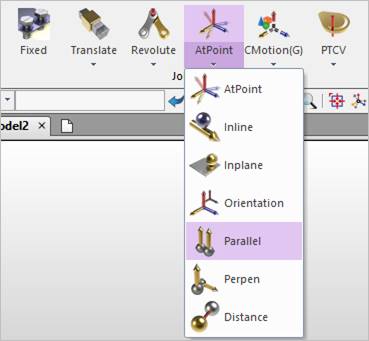
Figure 2 Parallel icon of the Joint group in the Professional tab