This allows the user to measure the total mass and the moment of inertia for the selected bodies or subsystems. If the user does not specify a reference marker for the Inertia Position, the moments of inertia are calculated from the mass center of selected bodies.
Figure 1 Mass icon in the Measure group of the Home tab
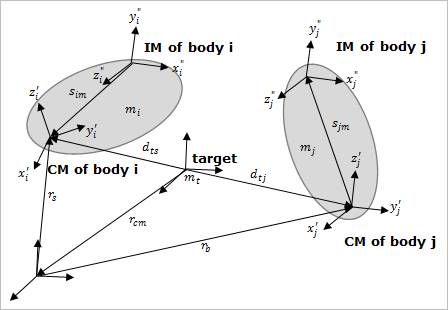
Figure 2 Definition of Mass Properties
•Mass: Shows the total mass of selected bodies or subsystems. The total mass can be computed from the following equation.

where  is the mass of each body.
is the mass of each body.
•Mass Center
where  is the position vector of the
mass center of each body.
is the position vector of the
mass center of each body.
•Inertia Moment
•If the
inertia moment  which is defined on the inertia
marker of a body is transformed into the center marker of the body, the
transformed inertia moment
which is defined on the inertia
marker of a body is transformed into the center marker of the body, the
transformed inertia moment  can be computed as
follows.
can be computed as
follows.

where
 and
and  are the orientation matrices of
the inertia marker with respect to the center marker and the identity matrix,
respectively.
are the orientation matrices of
the inertia marker with respect to the center marker and the identity matrix,
respectively.  is the position vector from the
inertia marker to the center marker with respect to the center marker reference
frame.
is the position vector from the
inertia marker to the center marker with respect to the center marker reference
frame.
•If the
inertia moment  which is defined on the center
marker of body is transformed into the target marker, the transformed inertia
moment
which is defined on the center
marker of body is transformed into the target marker, the transformed inertia
moment  can be computed as follows.
can be computed as follows.

where  is the orientation matrix of
the center marker of i body.
is the orientation matrix of
the center marker of i body.  and
and  are the orientation matrices of
the center marker of target body and the target marker, respectively.
are the orientation matrices of
the center marker of target body and the target marker, respectively.  is the distance vector from the
target marker to the center marker of i body with respect to the target marker
reference frame. This can be computed as follows.
is the distance vector from the
target marker to the center marker of i body with respect to the target marker
reference frame. This can be computed as follows.

If the target is
the position of the mass center of the selected bodies, both and are the identity matrix and
 is the zero vector. Thus, the
distance vector can be defined as follows.
is the zero vector. Thus, the
distance vector can be defined as follows.
•Finally the sum of inertia moments is determined by following equation.
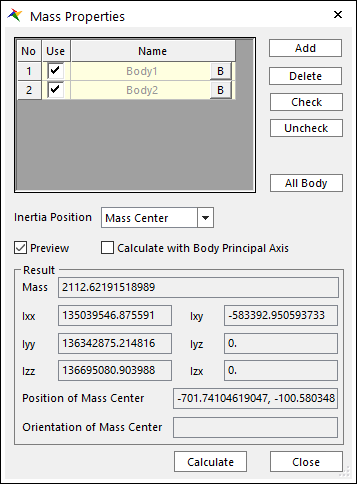
Figure 3 Mass Properties dialog box
•Name: Displays the names of all available bodies or subsystems.
•Add: Add a row to the list.
•Delete: Delete the current row from the list.
•Check/Uncheck: Select or unselect the current entity.
•All Body: Add all bodies and subsystems in a model.
•Inertia Position: Selects Mass Center or reference Marker.
•Preview: Show Mass Center on the working window.
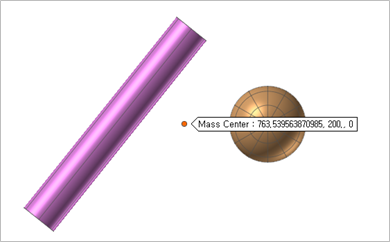
Figure 4 Preview Mass Center on the working window
•Calculate with Body Principal Axis: Calculates the Moments of Inertia by the body’s principal axis. If not using this option, it is calculated by the orientation of the center marker.
•Mass: Displays the total mass of the selected bodies.
•Moments of Inertia (Ixx, Iyy, Izz, Ixy, Iyz, and Izx): Displays the components of the moments of inertia.
•Position of Mass Center: Displays the position of the mass center with respect to Ground.InertiaMarker.
•Orientation of Mass Center: Displays the orientation of the Mass Center when the option Calculate with Body Principal Axis is on.
Step to Calculate Mass Property
1. Add rows to the list by clicking Add.
2. Select the desired bodies or subsystems. (If the user wants to select more bodies or subsystems, repeat steps 1 and 2).
3. Select Inertia Position type. If the user selects Marker, the user should navigate a marker to select the reference marker for Inertia Position.
4. Click Calculate.