 (1x1)
(1x1)
RecurDyn RFlex has the 9 invariant variables as follows.
1. Invariant variable M1: (1x1)
2. Invariant variable M2:  (3x1)
(3x1)
3. Invariant variable M3:  (3x3)
(3x3)
4. Invariant variable N1:  j=1, nM ((3x1)x nM)
j=1, nM ((3x1)x nM)
5. Invariant variable N2:  j=1, nM ((3x3)x nM)
j=1, nM ((3x3)x nM)
6. Invariant variable N3:  j=1, nM ((3x3)x nM)
j=1, nM ((3x3)x nM)
7. Invariant variable N4:  j,k=1, nM ((3x3)x nM x nM)
j,k=1, nM ((3x3)x nM x nM)
8. Invariant variable N5:  j=1, nM ((3x1)x nM)
j=1, nM ((3x1)x nM)
9. Invariant variable N6:  j,k=1, nM ((3x1)x nM x nM)
j,k=1, nM ((3x1)x nM x nM)
Where,
 is a lumped mass of p node.
is a lumped mass of p node.
 is a position vector of p node with respect to
RFlex body reference frame.
is a position vector of p node with respect to
RFlex body reference frame.
 is a moment of inertia of p node with respect to
RFlex body reference frame.
is a moment of inertia of p node with respect to
RFlex body reference frame.
 and
and  are translation and rotational mode
shape with j-th
mode of p
node.
are translation and rotational mode
shape with j-th
mode of p
node.
nM is number of modes.
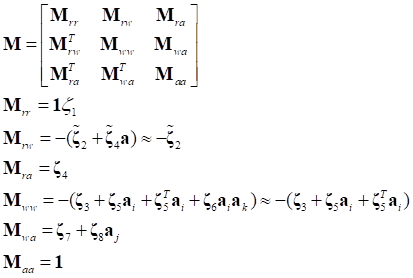
① Mass matrix for RFlex body is defined as follows using the RD/RFlex Invariant variables. (r : translational DOF, w : rotational DOF, a : modal coordinates)
② Mass center position of RFlex body
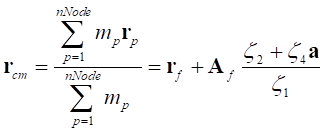
Where,
 and
and  are a position vector and an
orientation matrix of the RFlex body in a simulation time, respectively.
are a position vector and an
orientation matrix of the RFlex body in a simulation time, respectively.
 is the modal coordinate vector
in a simulation time.
is the modal coordinate vector
in a simulation time.