
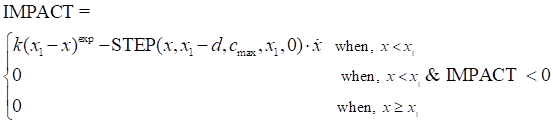
The IMPACT function returns the contact force in a contact model defined by the relative location and velocity of two markers.
Format
Arguments definition
|
Distance( |
The expression for the relative distance between the two markers on the contacting entities |
|
Velocity( |
The expression for the relative velocity between the two markers on the contacting entities |
|
Free length( |
The contact distance between the two markers on the contacting entities •This must be a real number or a function that returns a real number. •The free length(x1) determines whether or not contact is made. |
|
Stiffness( |
The modulus rigidity on the spring force |
|
Stiffness exponent( |
The nonlinear coefficient value on the surface of the spring force |
|
Damping( |
The maximum damping coefficient for the calculation of the damping force |
|
Penetration( |
The depth at which the damping coefficient reaches 0 |
Formulation
Example
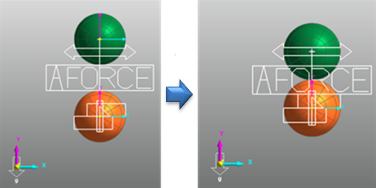
Figure 1 Example modeling for the IMPACT function
IMPACT(DY(Body2.Marker1,Body1.Marker2,Body1.Marker2),VY(Body2.Marker1,Body1.Marker2,Body1.Marker2),100,1000,1.3,10,2)
•x = DY: Distance variable
• = VY: The time derivative of y
= VY: The time derivative of y
•x1 = 0.0: Free length of y
•k =1000: Stiffness
•exp = 1.3: Exponent of the force
•cmax = 10: Maximum damping coefficient
•d = 2: Boundary penetration
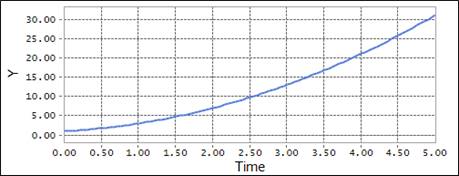
Figure 2 Scope result using the IMPACT function
 )
) )
)
 )
)

 )
)