 :
:
Overview
Hyperelastic materials can be used with FFlex bodies composed of Solid4, Solid5, Solid6, and Solid8 element types. However, hyperelastic materials are designed for use with hexa-dominant meshes. A hexa-dominant mesh is one in which most of the elements are Solid8 elements, and the other elements are only supporting elements that fill difficult-to-mesh regions. If the body does not contain enough Solid8 elements, or if it contains too many Solid4, Solid5, or Solid6 elements, it will not be guaranteed to run.
Hexa-dominant Meshes
There is no strict rule about the required number of Solid8 elements. Every element that uses hyperelastic materials also has a constant volume constraint imposed on it. In certain configurations, too many Solid4, Solid5, or Solid6 elements can cause the body to be over-constrained, which will cause the solver to fail. A general guideline is that there should be at least as many Solid8 elements as other elements in the mesh in order for the simulation to be able to run. However, it is possible that certain meshes might be able to run even if they have very few Solid8 elements. Some experimentation might be required by the user to determine if a specific mesh has enough Solid8 elements.
If the RecurDyn/Mesher is used to create a mesh for a hyperelastic material, then the user should choose to mesh using a Mesh Type of Solid8(Hexa8). The element size should be small enough that the mesher generates mostly Solid8 elements. If the element size is too large, the mesher will generate too many Solid4, Solid5, and Solid6 elements.
Over-Constraint
It is also possible to create over-constraint on meshes that have hyperelastic materials. For FFlex bodies, over-constraint is a condition in which there are too many constraints on the nodes. If there are too many constraints, then the system of equations that RecurDyn must solve can be singular. When this happens, the simulation cannot run. Usually, if a simulation is run in which the model has over-constraint, then the integrator terminates early due to an integration error.
Over-constraint can be caused by:
•Placing boundary conditions on nodes that are connected to Solid4, Solid5, or Solid6 elements that have hyperelastic materials
•Using constraint-type FDR elements on elements connected to Solid4, Solid5, or Solid6 elements that have hyperelastic materials.
In many cases, using boundary conditions or constraint-type FDR elements will not cause problems. But in some cases, it is possible that this can cause over-constraint. There is no simple method for determining if over-constraint will result from a boundary condition or a constraint-type FDR element. In general, though, it is recommended to avoid as much as possible placing boundary conditions or constraint-type FDR elements on nodes that connect to elements that use hyperelastic materials.
Theoretical Background
Hyperelastic materials in RecurDyn are derived from an
internal energy function :

where:
 : The strain energy density
function
: The strain energy density
function
 : The volume of the element in its
undeformed configuration
: The volume of the element in its
undeformed configuration
The strain energy density function is different for each
hyperelastic material. is a function of properties of
the deviatoric left Cauchy-Green deformation tensor :
:

in which  is the deviatoric
deformation gradient, given by
is the deviatoric
deformation gradient, given by

where
 : The deformation gradient
: The deformation gradient
 : The determinant of the deformation
gradient
: The determinant of the deformation
gradient
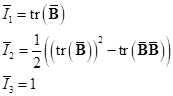
All hyperelastic strain energy density functions in RecurDyn,
except for Ogden materials, are functions of the invariants of . The invariants of are:
Ogden materials, however, are a function of the principal
stretches. The principal stretches  ,
,  , and
, and  are the square roots of the
eigenvalues of .
are the square roots of the
eigenvalues of .
 for
for 
where  ,
,  , and
, and  are the eigenvalues of .
are the eigenvalues of .
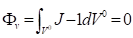
Constant Volume Constraint
All hyperelastic materials in RecurDyn are modeled as
purely incompressible, which is the equivalent to having a Poisson’s ratio of
0.5. Incompressibility is enforced with a volumetric constraint  .
.
RecurDyn adds one constraint equation to the equations
of motion for every element that uses a hyperelastic material.