FFlex
Contact
The output of flexible contact forces in
RecurDyn/FFlex is a contact force generalized on the specified marker.
The contact force is a force and torque generalized on the user-defined marker.
The default marker is the inertia reference frame. If the base or action body of
a contact is a rigid body, the reference marker for output is automatically
defined as the center marker of the body.
As shown in Figure 1, the position vector of  and
and  are the
displacement vectors from the positions of the specified reference frame to the
actual contact point to plot contact forces applied on the action and base
bodies. The contact force vectors of
are the
displacement vectors from the positions of the specified reference frame to the
actual contact point to plot contact forces applied on the action and base
bodies. The contact force vectors of  and
and  are the contact normal force
and the friction force, respectively.
are the contact normal force
and the friction force, respectively.
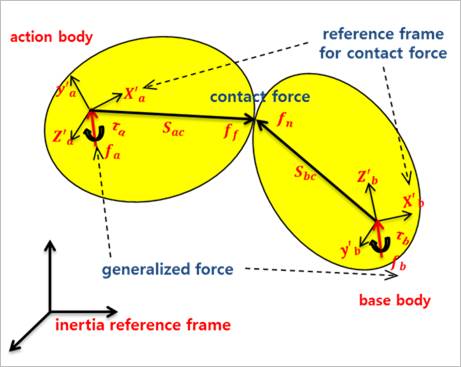
Figure 1 Definition of contact plot data
•
FM_Contact_Action: The magnitude of the translational force
generalized at the specified marker due to the contact force acting on the
contact point of action body.
•
FX_Contact_Action, FY_Contact_Action, FZ_Contact_Action: The x, y
and z components of the translational force generalized at the specified marker
due to the contact force acting on the contact point of action body.

•
TM_ Contact_Action: The magnitude of the torque generalized at the
specified marker due to the contact force acting on the contact point of action
body.
•
TX_Contact_Action, TY_Contact_Action, TZ_Contact_Action: The x, y
and z components of the torque generalized at the specified marker due to the
contact force acting on the contact point of action body.

where,  is the orientation matrix of
the specified reference frame to output a contact force applied on the action
body.
is the orientation matrix of
the specified reference frame to output a contact force applied on the action
body.
•
FM_Contact_Base: The magnitude of the translational force
generalized at the specified marker due to the contact force acting on the
contact point of base body.
•
FX_Contact_Base, FY_Contact_Base, FZ_Contact_Base: The x, y and z
components of the translational force generalized at the specified marker due to
the contact force acting on the contact point of base body.

•
TM_Contact_Base: The magnitude of the torque generalized at the
specified marker due to the contact force acting on the contact point of base
body.
•
TX_Contact_Base, TY_Contact_Base, TZ_Contact_Base: The x, y and z
components of the torque generalized at the specified marker due to the contact
force acting on the contact point of base body.

where,  is the orientation matrix of
reference frame specified to output a contact force applied to the base
body.
is the orientation matrix of
reference frame specified to output a contact force applied to the base
body.