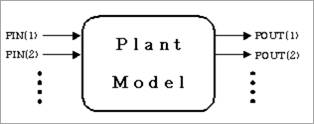
RecurDyn model includes the plant model, the plant inputs and the plant outputs as Figure 1.
Figure 1 Multi Body System
RecurDyn/Linear carries out linearization of plant model.
The linearized equation of plant model become
 (1)
(1)
We define states as
 and
and  (2)
(2)
From equation (1), the A matrix and B matrix can be derived as below equation

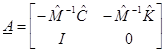
 (3)
(3)
Plant outputs are defined the function of  ,
,
 and U.
and U.
 (4)
(4)
Conclusively, in State Matrix the linearized RecurDyn model is represented as:
 (5)
(5)
Where:
 represents the state variables of the
plant.
represents the state variables of the
plant.
U represents the plant inputs.
Y represents the plant outputs.
A, B, C and D are state matrices.
You can define the plant inputs and plant outputs. RecurDyn/Solver automatically determines the states. But if you want to make arbitrary coordinate states, you change states by modeling plant input force in the arbitrary coordinate.