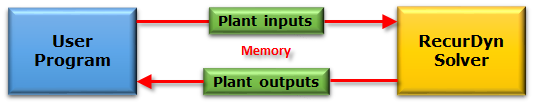
RecurDyn/Control offers the general method to control the multibody dynamic model built in RecurDyn. The Figure below shows in more detail how the interfaces work. In general method, the exchanged variables are the plant inputs and plant outputs.
It has two modes to co-simulate RecurDyn with User-defined program.
•One mode is that RecurDyn is a host program.
•The other is that User-defined program is a host program.
A control system designer wants the User-defined program which is a host program, but a dynamic system designer wants RecurDyn which is a host program.
Figure 1 Control System

Figure 2 General icon of the Control group in the Communicator tab