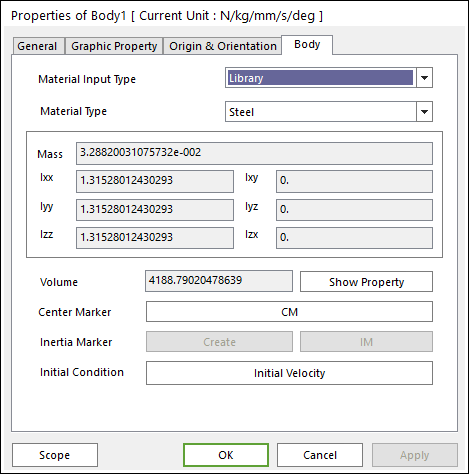
This page allows the user to specify various body properties.
Figure 1 Body property page [Body page]
•User Input: If this option is selected, the user can modify the value of the mass and the moment of inertia directly in each input section. Additionally, the parametric values can be used by clicking PV after generating them in advance.

Figure 2 Body property page [User input]
•Density: If this option is selected, the mass and the moments of inertia are calculated automatically based on the user-defined density.
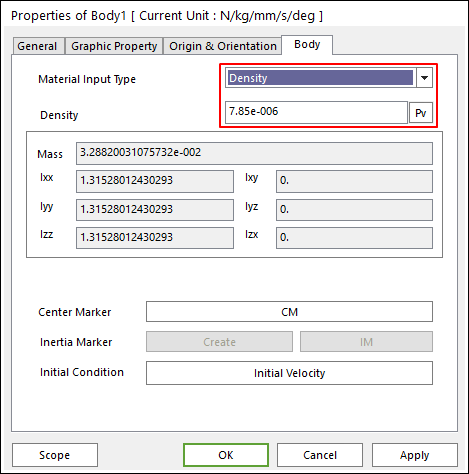
Figure 3 Body property page [Density]
•Library: If this option is selected, the user can choose one from the pre-defined material library in Material Type. Additionally, the new material type can be added to the material library by using Material Property in the SubEntity tab.
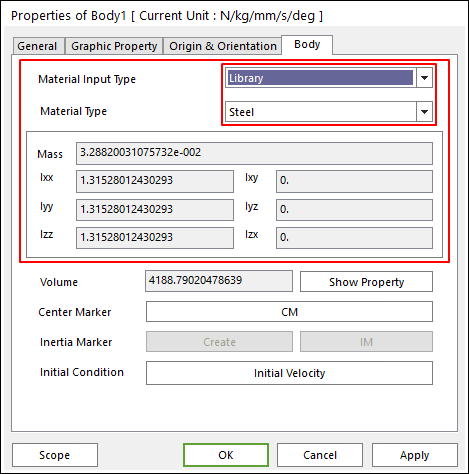
Figure 4 Body property page [Library]
•Volume: When the Library type is selected, it shows the calculated volume of a body.
•Show Property: When the Library type is selected, it shows the information of the selected material such as Density, Young’s Modulus, and Poisson’s Ratio.
•Center Marker: Shows the mass center marker using the Marker property dialog box. It is possible to change the position of the mass center in the case of User Input type.
•Inertia Marker: When the User Input type is selected, the Inertia Marker which is used as the reference marker when calculating Moments of Inertia can be created by clicking Create, and the user can define the position and orientation of this marker by clicking IM.
•Initial Velocity: Defines the initial velocity of a body.
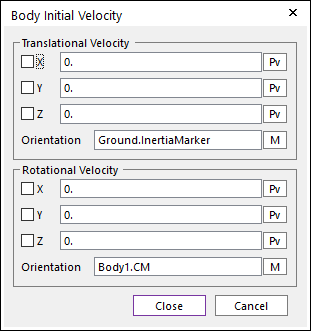
Figure 5 Body Initial Velocity dialog box
•Translational Velocity: Specifies Translational Velocity of three components such as X, Y, and Z with respect to the Reference Marker by activating the check box. Note: In other to apply the value correctly, it recommends checking all axis.
o Reference Marker: Defines the reference marker to apply the initial velocities. The default reference marker is Inertia Marker of Ground. Therefore, Translational Velocity is applied to the body with respect to the orientation of Inertia Marker of Ground.
•Rotational Velocity: Specifies Rotational Velocity of three components such as X, Y, and Z with respect to the Reference Marker by activating the check box. Note: In other to apply the value correctly, it recommends checking all axis.
o Reference Marker: Defines the reference marker to apply the rotational velocities. The default reference marker is Center Marker (CM) of the body. Therefore, Rotational Velocity is applied to the body with respect to the orientation of Center Marker of the body.