The lists of Bodies include a result set about each body as position, velocity and acceleration.
(In the case of RFlex body, the plot data is defined the RFlex Body Reference Frame instead CM.)
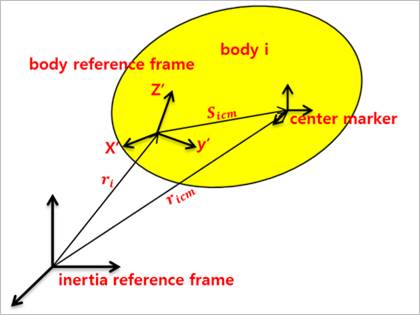
Figure 1 Kinematic relationship for plot data of body
•Pos_TM: The magnitude of the translational displacement of the center marker in the inertia reference frame.
•Pos_TX, Pos_TY, Pos_TZ: The x, y, and z components of the translational displacement of the center marker in the inertia reference frame.

•Pos_PSI, Pos_THETA, Pos_PHI: The 3-1-3 Euler angle of the center marker measured in the inertia reference frame.

•Pos_YAW, Pos_PITCH, Pos_ROLL: The 3-2-1 Euler angle of the center marker measured in the inertia reference frame.

•Vel_TM: The magnitude of the translational velocity of the center marker in the inertia reference frame.
•Vel_TX, Vel_TY, Vel_TZ: The x, y, and z components of the translational velocity of the center marker in the inertia reference frame.

•Vel_RM: The magnitude of the angular velocity of the center marker in the inertia reference frame.
•Vel_RX, Vel_RY, Vel_RZ: The x, y, and z components of the angular velocity of the center marker in the center marker reference frame.

•Acc_TM: The magnitude of the translational acceleration of the center marker in the inertia reference frame.
•Acc_TX, Acc_TY, Acc_TZ: The x, y, and z components of the translational acceleration of the center marker in the inertia reference frame.

•Acc_RM: The magnitude of the angular acceleration of the center marker in the inertia reference frame.
•Acc_RX, Acc_RY, Acc_RZ: The x, y, and z components of the angular acceleration of the center marker in the center marker reference frame.
