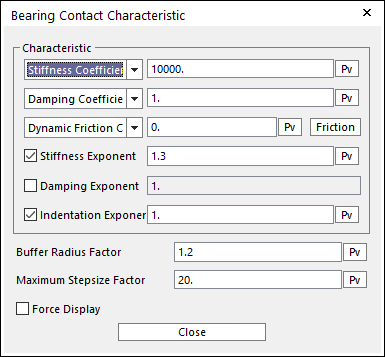
Figure 1 Bearing Contact Characteristic dialog box
•Stiffness Coefficient: Specifies a stiffness coefficient for the contact normal force.
•Damping Coefficient: Specifies a viscous damping coefficient for the contact normal force.
•Friction Coefficient: Specifies a dynamic friction coefficient for the contact friction force.
•They can also be given as user-defined spline curves.
•Friction: Specifies some friction coefficients for the contact friction force as shown in Figure 3.
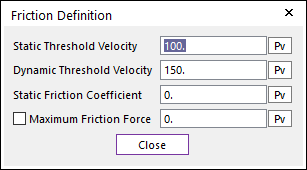
Figure 2 Contact friction dialog box
•Static Threshold Velocity: If the relative velocity between a contact pair is less than this value, the friction coefficient is defined as follows:

•Dynamic Threshold Velocity :If the relative velocity between a contact pair is greater than :
This value, the friction coefficient is the same as the specified dynamic friction coefficient.
The 'Static Threshold Velocity' and less than this value, the friction coefficient is defined as follows:

•Static Friction Coefficient: Specifies the static friction coefficient.
•Maximum Friction Force: Is checked, the contact friction force is limited to this value.
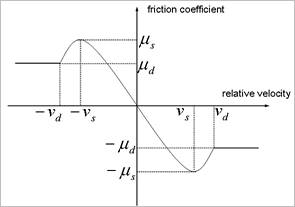
Figure 3 Relationship between relative velocity and friction coefficient
The friction force of contact elements is determined by the following equations.
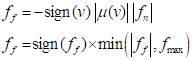
where,  and
and
 are the Contact normal
force, Friction coefficient and Maximum friction force. The
friction coefficient of
are the Contact normal
force, Friction coefficient and Maximum friction force. The
friction coefficient of  is determined by a relative and
tangential velocity on the contact point.
is determined by a relative and
tangential velocity on the contact point.
•Buffer Radius Factor: Allows the numerical integrator reduces the step size by the maximum Stepsize factor if the action body comes closer than the Buffer radius factor* Action body radius.
•Maximum Stepsize Factor: Allows the maximum step size is reduced by a factor of the maximum step size factor.