
The AX function returns the cumulative rotation angle on the x-axis for one marker’s InertiaMarker or the cumulative rotation angle on the x-axis for two markers.
Format
Arguments definition
|
Marker1 |
The name or argument number of a marker to be calculated |
|
Marker2 |
The name or argument number of a marker to be calculated If omitted, then the InertiaMarker is applied. |
Formulation

 : y-direction unit vector of
Marker2
: y-direction unit vector of
Marker2
 : z-direction unit vector of
Marker1
: z-direction unit vector of
Marker1
 : z-direction unit vector of
Marker2
: z-direction unit vector of
Marker2
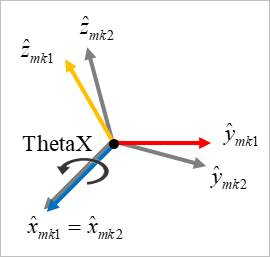
Here, ThetaX is utilized to calculate the cumulative rotation angle on the x-axis for two markers.
If x-axis for two markers is deviated, ThetaX becomes inaccurate result.
Example
AX (body1.Marker1)
AX (body1.Marker1, body2.Marker2)
AX (1,2) <Argument: (1)body1.Marker1, (2)body2.Marker2 >